深度学习之图像分类(七)ResNet网络结构
本节学习ResNet网络结构,以及迁移学习入门,学习视频源于 Bilibili。
1. 前言
ResNet 是在 2015 年由微软实验室提出来的,斩获当年 ImageNet 竞赛中分类任务第一名,目标检测任务第一名,获得 COCO 数据集中目标检测第一名,图像分割第一名。总结而言就是 NB!更 NB 的是,这是中国人提出来的!原始论文为:Deep Residual Learning for Image Recognition。
网络越深,咱们能获取的信息越多,而且特征也越丰富。按理说,网络越来越深,至少能达到浅网络的性能,为什么呢?因为后面全部学习恒等映射就可以了呀。网络加深,不是想加就加的;恒等映射,不是说学就能学的。
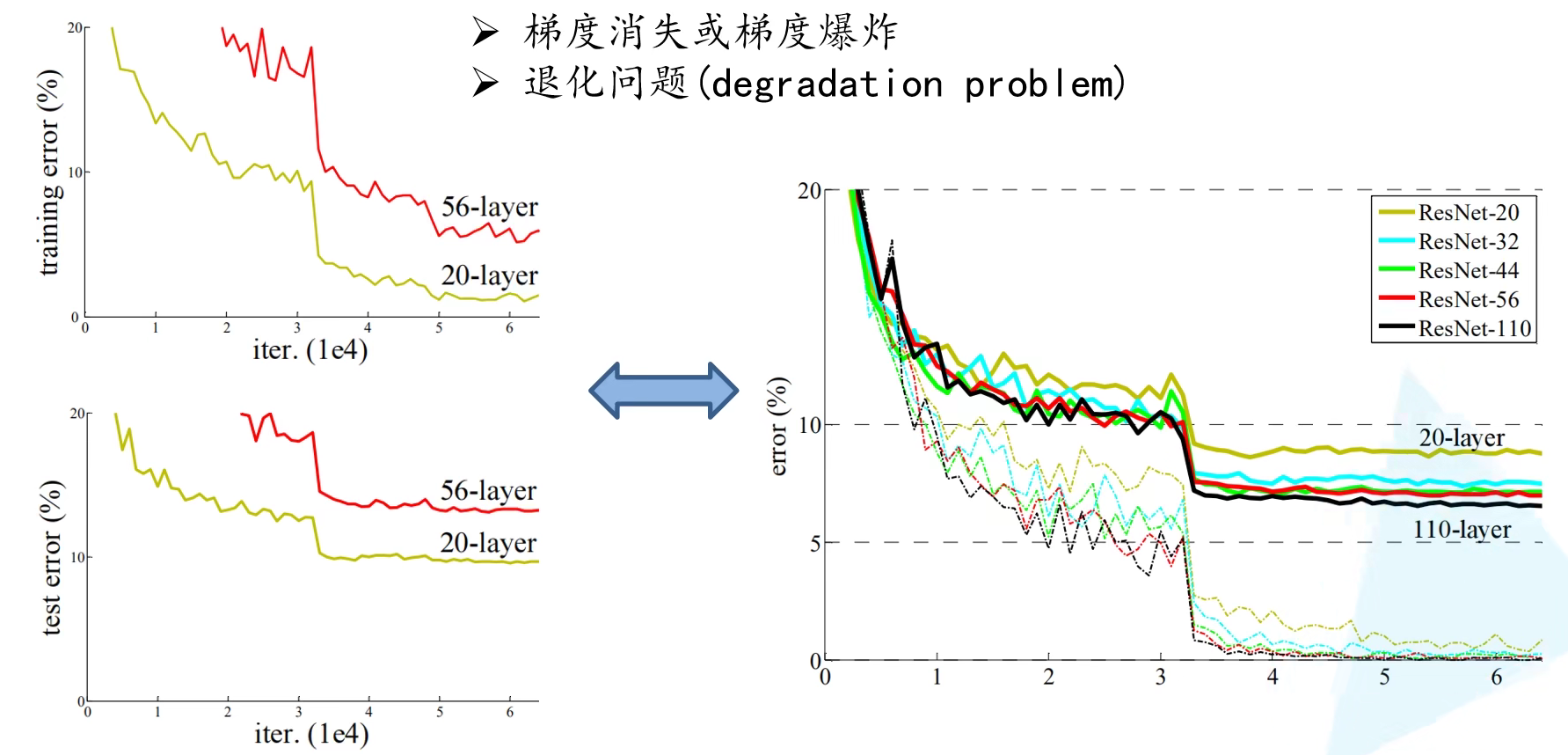
但是根据实验表明,随着网络的加深,优化效果反而越差,测试数据和训练数据的准确率反而降低了。这是由于网络的加深会造成梯度爆炸和梯度消失的问题。目前针对这种现象已经有了解决的方法:通常是通过对数据进行标准化处理,权重初始化,以及 Batch Normalization 来处理的,这种方法可以保证网络在反向传播中采用随机梯度下降(SGD),从而让网络达到收敛。但是,这个方法仅对几十层的网络有用,当网络再往深处走的时候,这种方法就无用武之地了。并且退化问题(degradation problem,层数深的效果没有浅的好,下图左边部分 )严重。下图中实线是验证集,虚线是训练集。右图中 ResNet 层数越深,错误率越低,确实解决了退化问题。
网络亮点在于:
- 超级深的网络结构(突破了 1000 层)
- 提出 Residual 模块(搭建深网络的基础,学恒等不如学习0变换)
- 使用 Batch Normalization 加速训练,丢弃了 Dropout
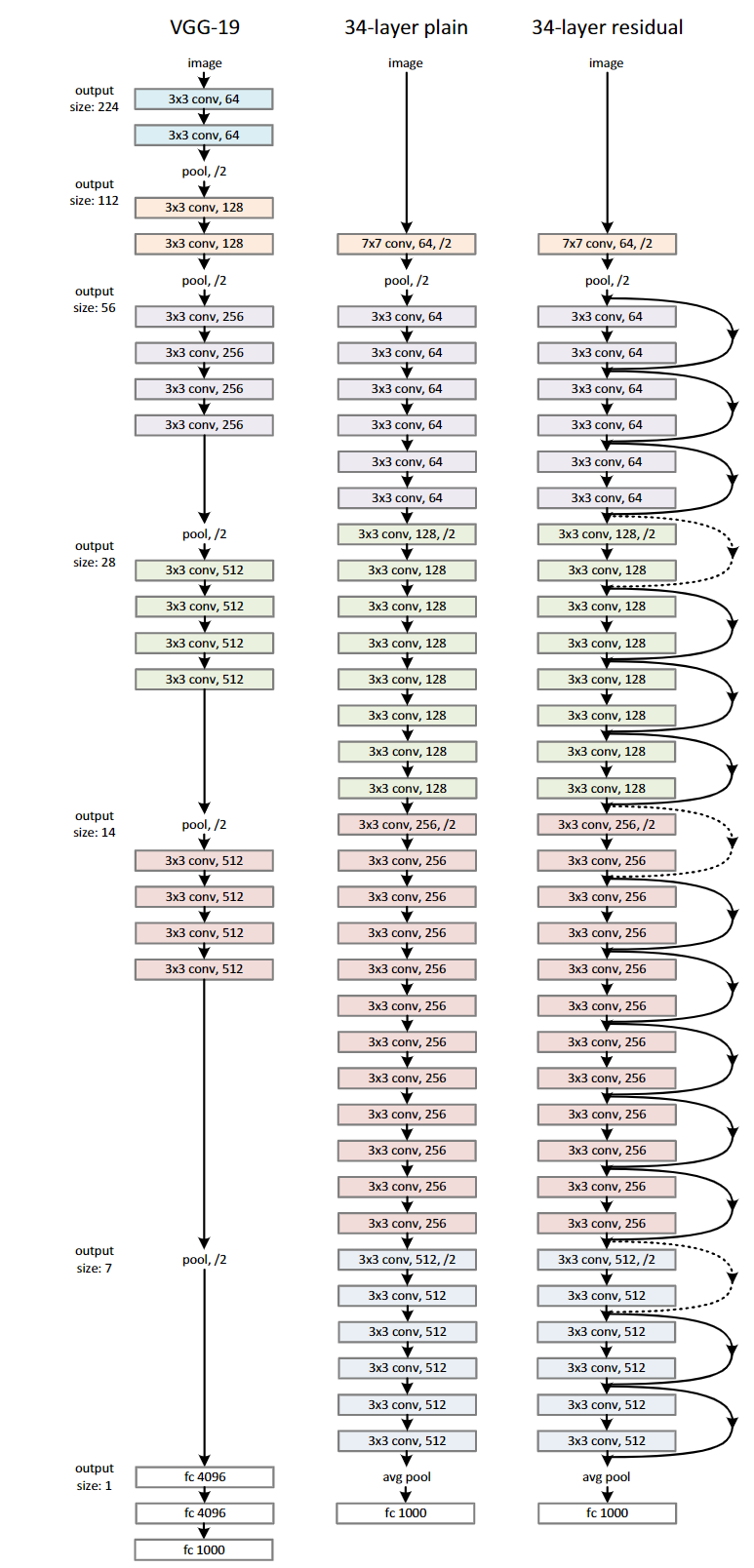
ResNet34 网络结构如下所示(conv_3, conv_4, conv_5 的第一个残差结构,虚线的残差结构需要注意):
2. Residual
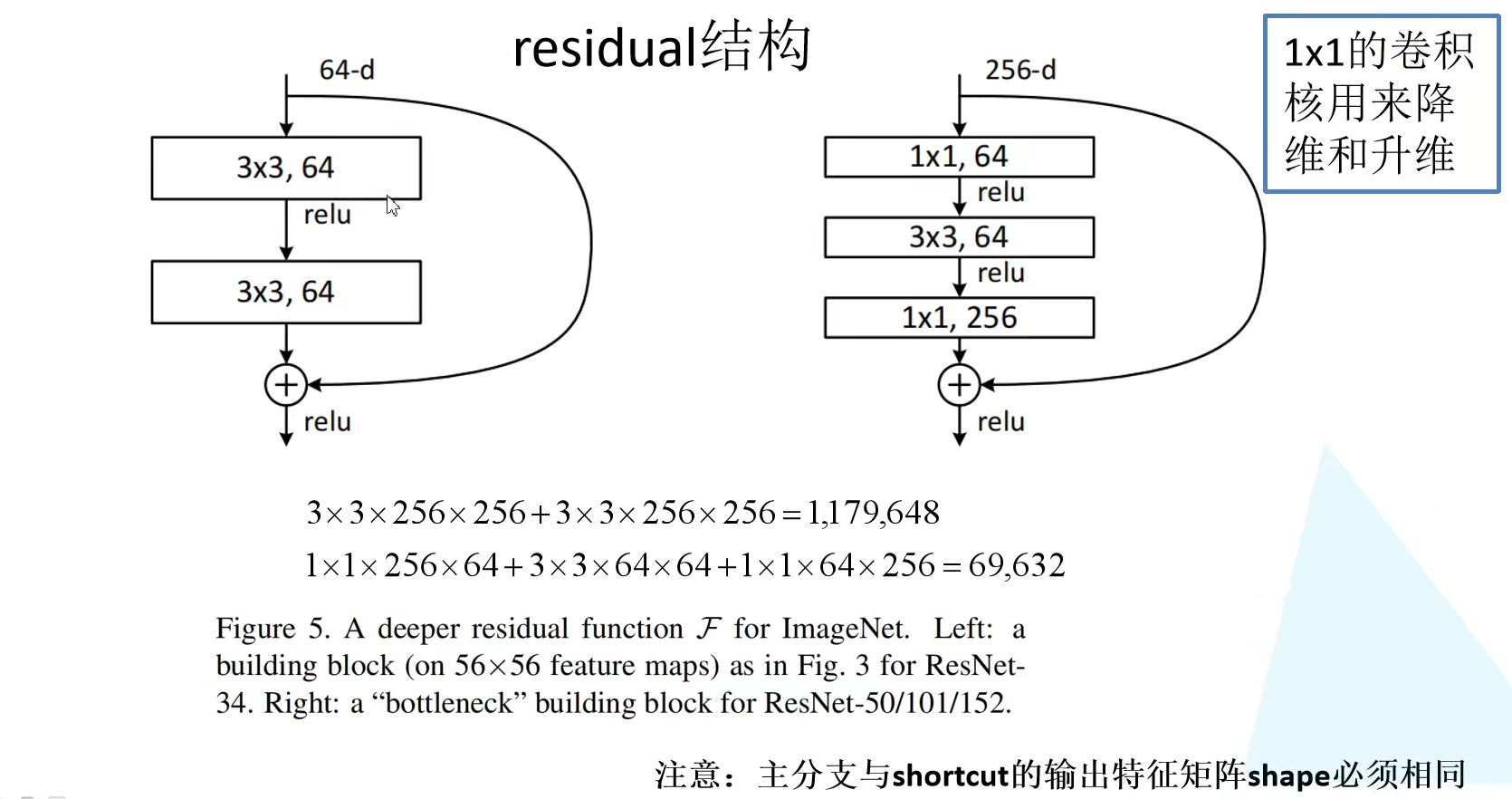
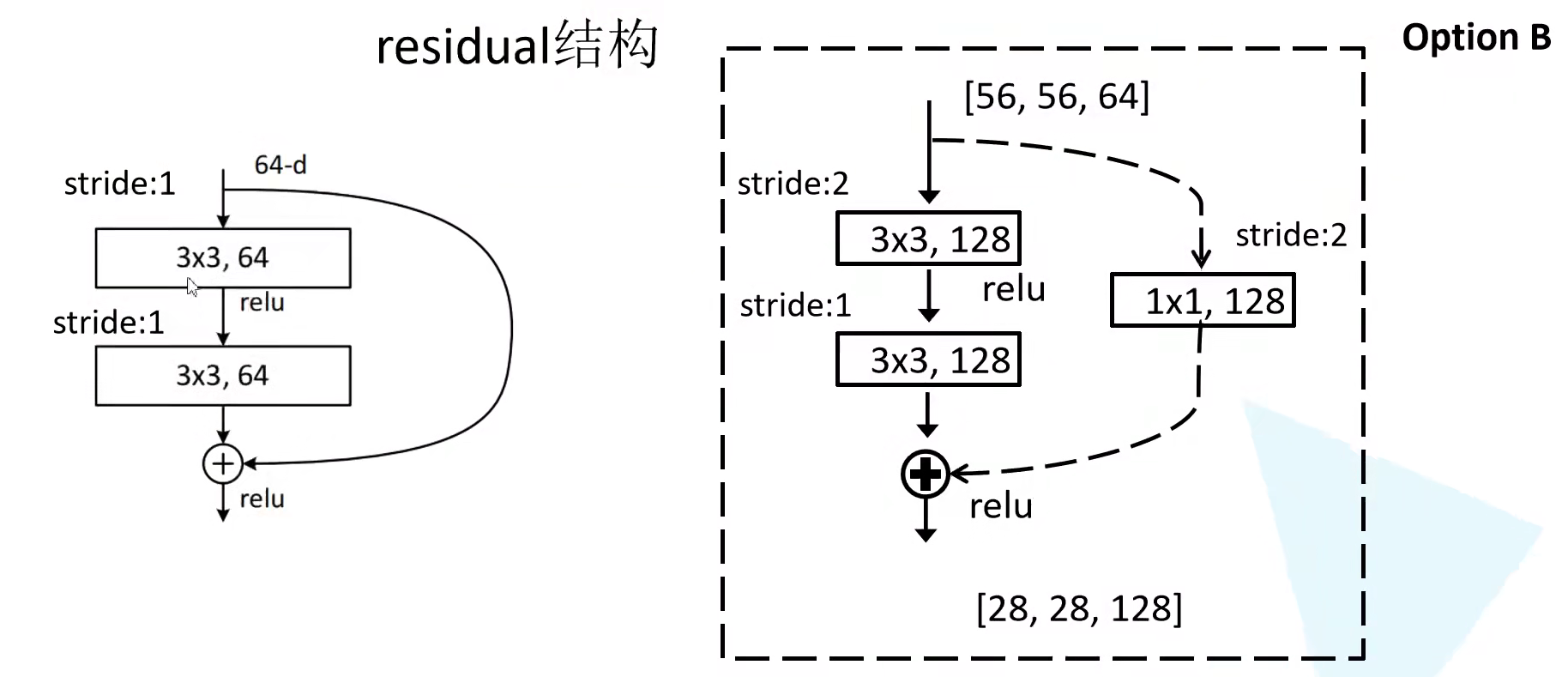
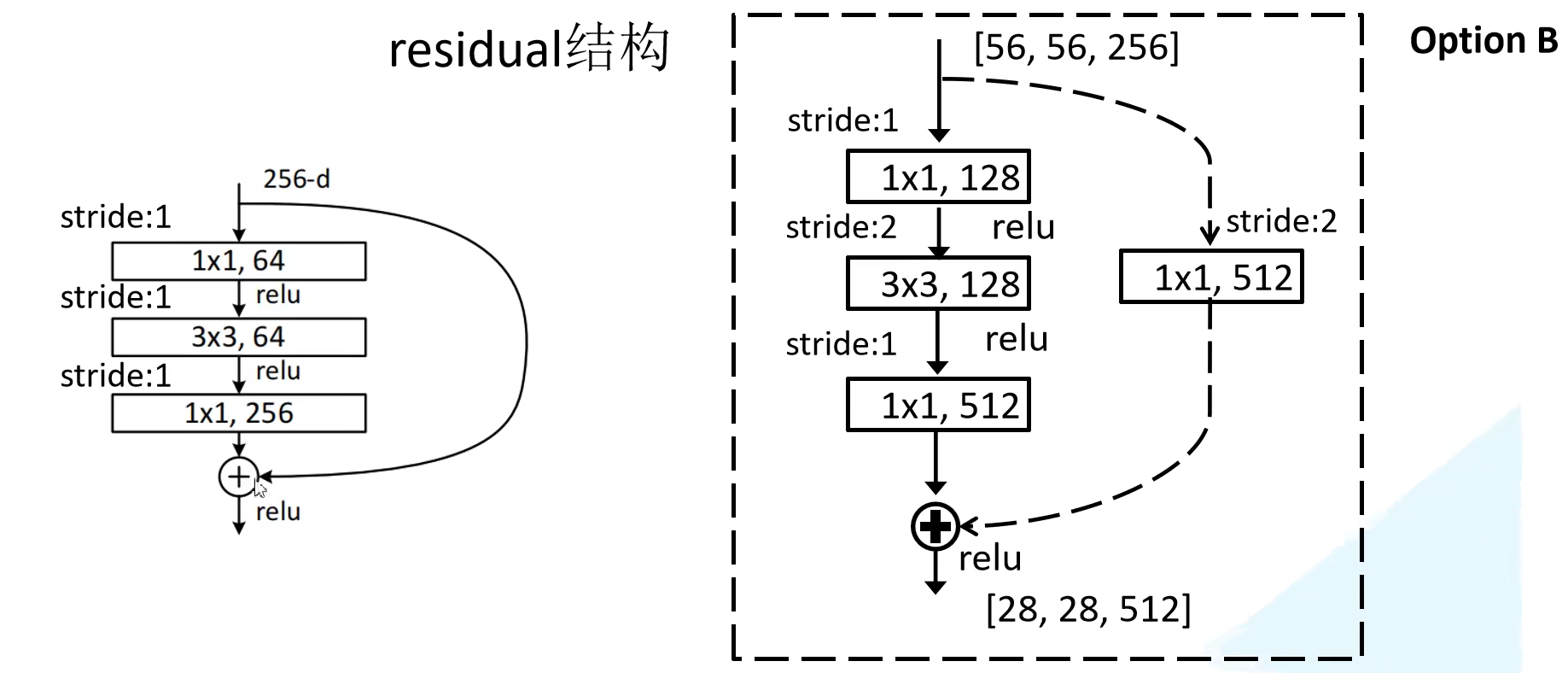
Residual 可以把它理解为一个子网络,这个子网络经过堆叠可以构成一个很深的网络。下图给出了两种残差结构。左边的主要针对网络层数较少的网络;右边主要针对网络层数较多的网络。左边结构中,主线是将输入特征矩阵经过两个 $3 \times 3$ 的卷积层,右边有一个弧线直接从输入连接到输出,与卷积后的特征矩阵按元素相加得到最终特征矩阵结果。右边的结构的主分支则是在输入与输出都加上了 $1 \times 1$ 的卷积层,用来实现降维和升维。右边的参数节省了 94%。
注意:加了之后再经过 ReLU 激活函数。
注意:主分支与 shortcut 分支的输出特征矩阵的 shape 必须一致才能进行元素加法。回顾,GoogleNet 是在深度方向进行拼接。
\(a^{[l+2]} = Relu(W^{[l+2]}(Relu(W^{[l+1]}a^{[l]} + b^{[l+1]})) + b^{[l+2]} + a^{[l]})\) 其中 $b$ 为卷积层偏置 bias。
如何理解 Residual 呢?
假设我们要求解的映射为:$H(x)$。现在咱们将这个问题转换为求解网络的残差映射函数,也就是 $F(x)$,其中 $F(x) = H(x)-x$。残差即观测值与估计值之间的差。这里 $H(x)$ 就是观测值,$x$ 就是估计值(也就是上一层Residual 输出的特征映射)。我们一般称 $x$ 为 Identity Function(恒等变换),它是一个跳跃连接;称 $F(x)$ 为 Residual Function。
那么我们要求解的问题变成了 $H(x) = F(x)+x$。有小伙伴可能会疑惑,我们干嘛非要经过 $F(x)$ 之后在求解 $H(x)$ 啊!整这么麻烦干嘛,直接搞不好吗,神经网络那么强(三层全连接可以拟合任何函数)!我们来分析分析:如果是采用一般的卷积神经网络的话,原先我们要求解的是 $H(x) = F(x)$ 这个值对不?那么,我们现在假设,在我的网络达到某一个深度的时候,咱们的网络已经达到最优状态了,也就是说,此时的错误率是最低的时候,再往下加深网络的化就会出现退化问题(错误率上升的问题)。我们现在要更新下一层网络的权值就会变得很麻烦,权值得是一个让下一层网络同样也是最优状态才行,对吧?我们假设输入输出特征尺寸不变,那么下一层最优的状态就是学习一个恒等映射,不改变输入特征是最好的,这样后续的计算会保持,错误了就和浅一层一样了。但是这是很难的,试想一下,给你个 $3 \times 3$ 卷积,数学上推导出来恒等映射的卷积核参数有一个,那就是中间为 1,其余为 0。但是它不是想学就能学出来的,特别是初始化权重离得远时。
但是采用残差网络就能很好的解决这个问题。还是假设当前网络的深度能够使得错误率最低,如果继续增加咱们的 ResNet,为了保证下一层的网络状态仍然是最优状态,咱们只需要把令 $F(x)=0$ 就好啦!因为 $x$ 是当前输出的最优解,为了让它成为下一层的最优解也就是希望咱们的输出 $H(x)=x$ 的话,是不是只要让 $F(x)=0$ 就行了?这个太方便了,只要卷积核参数都足够小,乘法加法之后就是 0 呀。当然上面提到的只是理想情况,咱们在真实测试的时候 $x$ 肯定是很难达到最优的,但是总会有那么一个时刻它能够无限接近最优解。采用 Residual 的话,也只用小小的更新 $F(x)$ 部分的权重值就行啦!不用像一般的卷积层一样大动干戈!
注意:如果残差映射($F(x)$)的结果的维度与跳跃连接($x$)的维度不同,那咱们是没有办法对它们两个进行相加操作的,必须对$x$进行升维操作,让他俩的维度相同时才能计算。升维的方法有两种:
- 全 0 填充
- 采用 $1 \times 1$ 卷积
3. 网络配置
下图给出了不同 ResNet 的配置图。
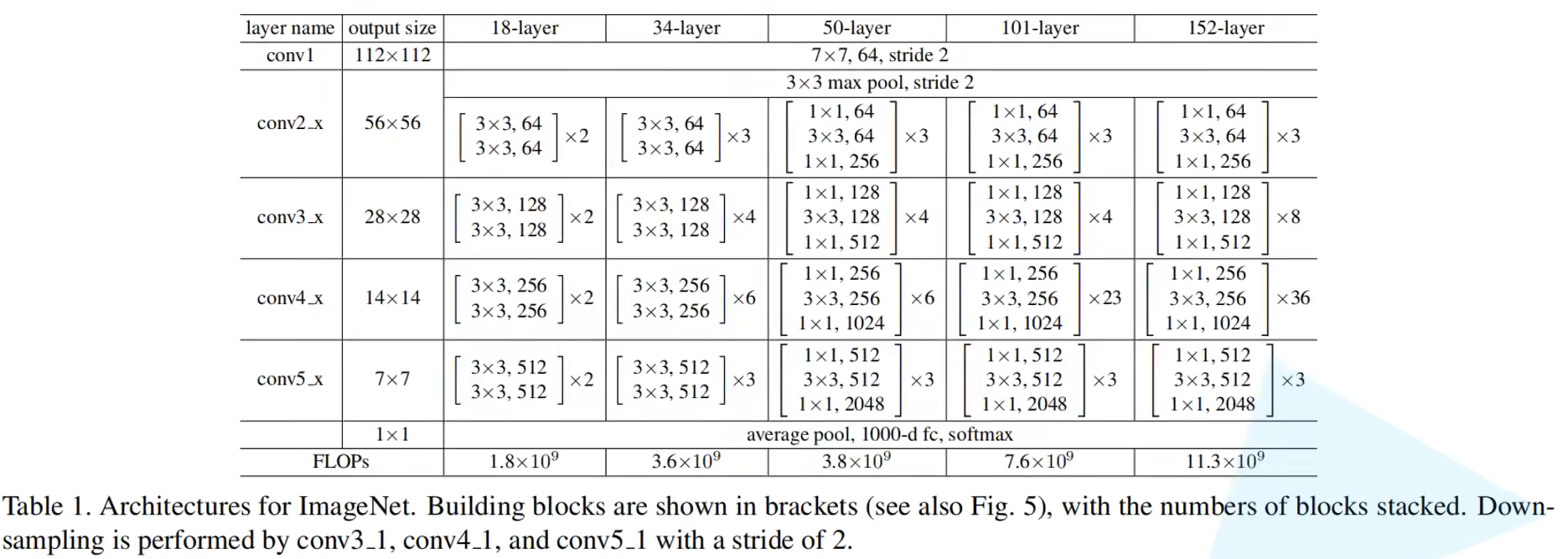
对于需要进行下采样的残差结构(conv_3, conv_4, conv_5 的第一个残差结构),论文使用如下形式(原论文有多个形式,我们这里说的是最后作者选择的形式),主线部分 $3 \times 3$ 的卷积层使用 stride = 2,实现下采样;虚线部分的 $1 \times 1$ 卷积且 stride = 2:
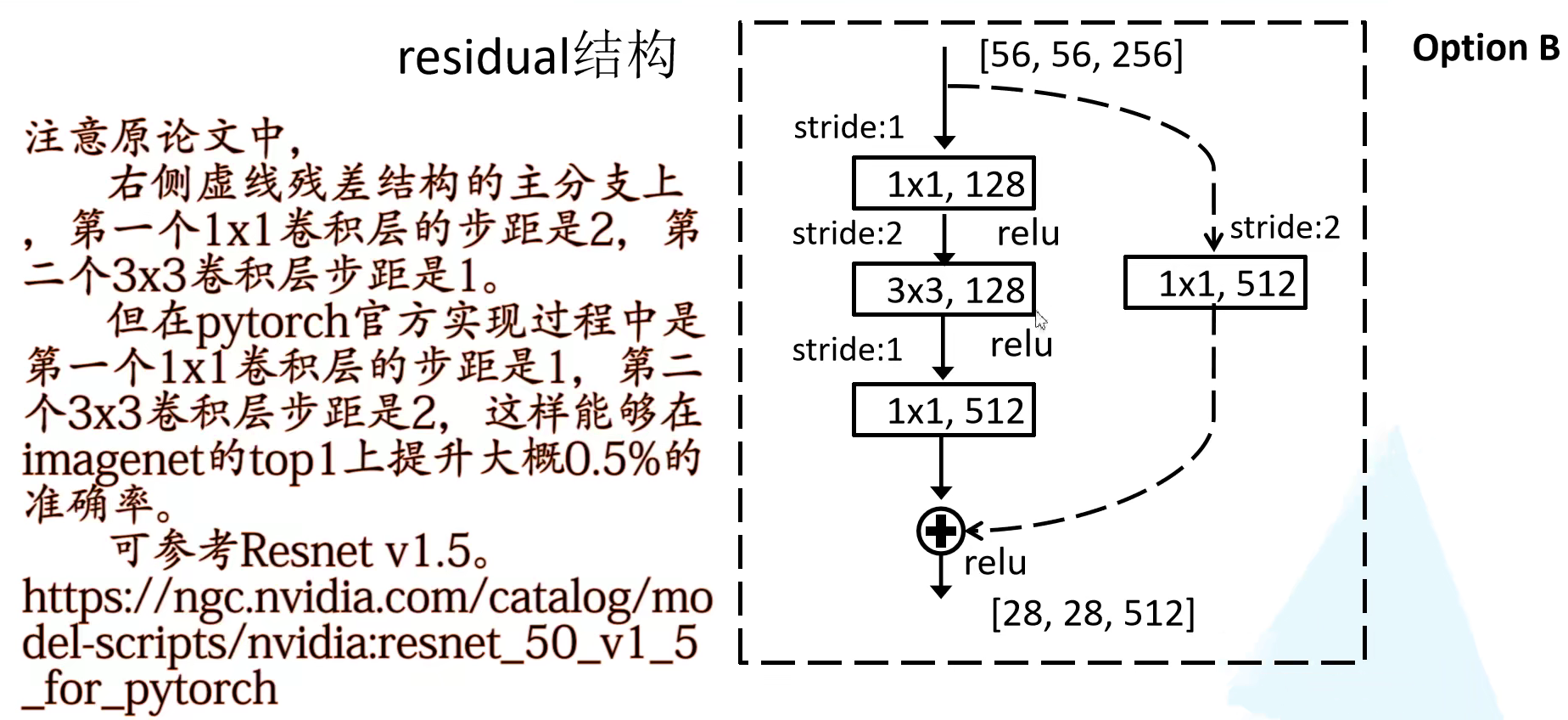
值得注意的是,pytorch 官方实现和原始论文有些许不同:
注意一些细节:对于 conv_2 一开始,在 Resnet18 和 ResNet34 得到的就是期望的 [56, 56, 64] 的输入;但是对于 ResNet50,ResNet101 和 ResNet152 而言,通过最大池化后得到的输出 shape 是 [56, 56, 64] ,而实线残差结构所需要的输入 shape 是 [56, 56, 256] ,所以 conv_2 对应的第一个也是虚线残差层,仅旁路只调整特征矩阵的深度,高和宽都不变。
通常我们都使用 ImageNet 的预训练参数(迁移学习),能够快速训练出一个理想的模型,尽管在小数据集下也能训练一个好的模型。注意使用别人预训练模型参数时,要注意别人的预处理方式,例如 ImageNet 的常见正则化为:
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
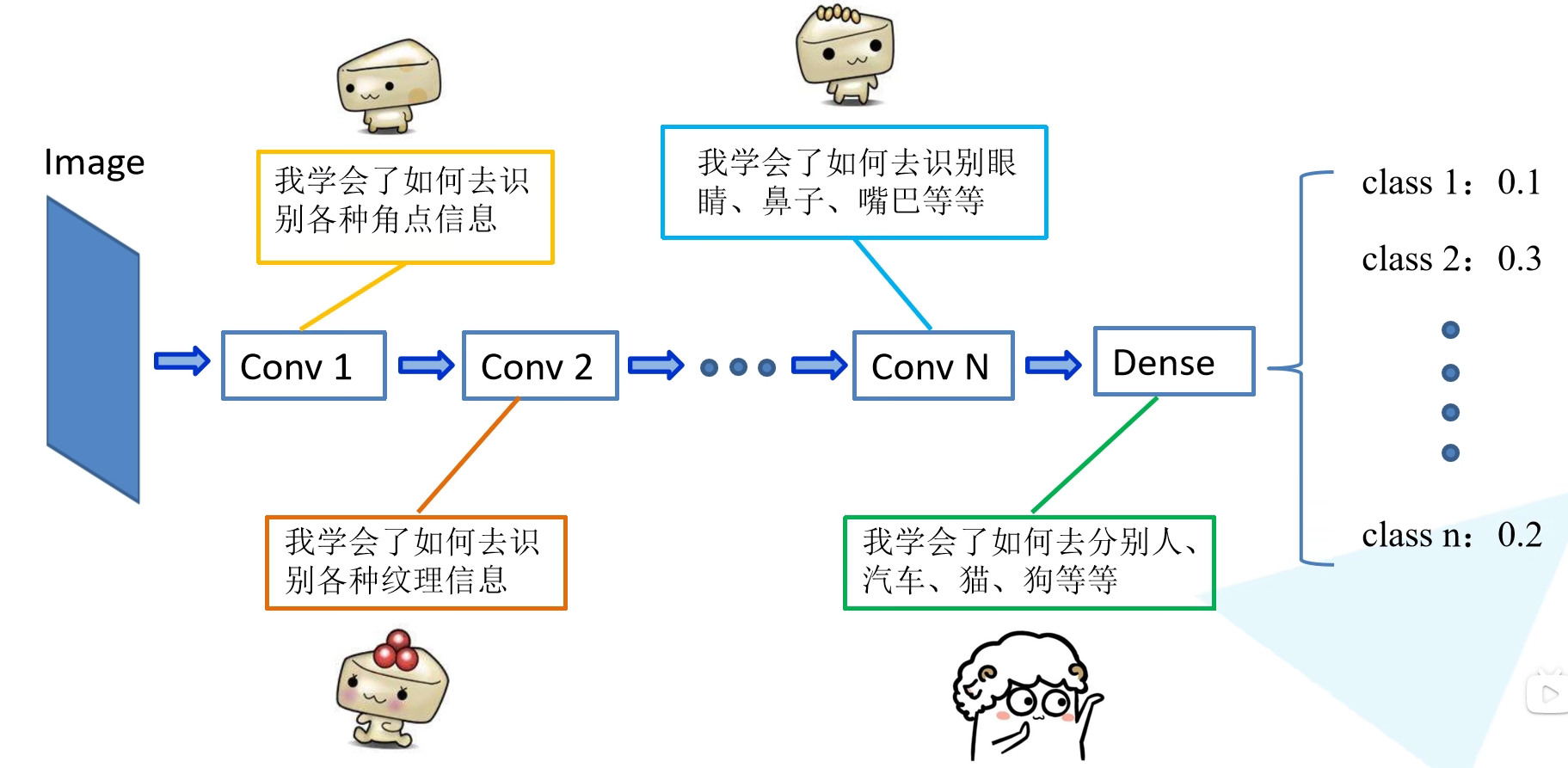
迁移学习大白文理解如下所示,假设网络训练完成之后,网络第一个卷积层可能学到了角点信息,第二个卷积层可能学会了分析纹理,再到后来的卷积层学到了如何识别部件。全连接层基于这些信息学会如何分类目标类别。通常浅层的卷积操作是通用的,所以可以直接使用用于初始化。
常见的迁移学习方式包括:
- 载入权重后训练所有参数
- 载入权重后只训练最后几层参数
- 在数权重后在原有网络基础上再加一层全连接,仅训练最后一个全连接层
4. 代码
ResNet 实现代码如下所示:
import torch.nn as nn
import torch
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, in_channel, out_channel, stride=1, downsample=None, **kwargs):
super(BasicBlock, self).__init__()
self.conv1 = nn.Conv2d(in_channels=in_channel, out_channels=out_channel,
kernel_size=3, stride=stride, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(out_channel)
self.relu = nn.ReLU()
self.conv2 = nn.Conv2d(in_channels=out_channel, out_channels=out_channel,
kernel_size=3, stride=1, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(out_channel)
self.downsample = downsample
def forward(self, x):
identity = x
if self.downsample is not None:
identity = self.downsample(x)
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out += identity
out = self.relu(out)
return out
class Bottleneck(nn.Module):
"""
注意:原论文中,在虚线残差结构的主分支上,第一个1x1卷积层的步距是2,第二个3x3卷积层步距是1。
但在pytorch官方实现过程中是第一个1x1卷积层的步距是1,第二个3x3卷积层步距是2,
这么做的好处是能够在top1上提升大概0.5%的准确率。
可参考Resnet v1.5 https://ngc.nvidia.com/catalog/model-scripts/nvidia:resnet_50_v1_5_for_pytorch
"""
expansion = 4
def __init__(self, in_channel, out_channel, stride=1, downsample=None,
groups=1, width_per_group=64):
super(Bottleneck, self).__init__()
width = int(out_channel * (width_per_group / 64.)) * groups
self.conv1 = nn.Conv2d(in_channels=in_channel, out_channels=width,
kernel_size=1, stride=1, bias=False) # squeeze channels
self.bn1 = nn.BatchNorm2d(width)
# -----------------------------------------
self.conv2 = nn.Conv2d(in_channels=width, out_channels=width, groups=groups,
kernel_size=3, stride=stride, bias=False, padding=1)
self.bn2 = nn.BatchNorm2d(width)
# -----------------------------------------
self.conv3 = nn.Conv2d(in_channels=width, out_channels=out_channel*self.expansion,
kernel_size=1, stride=1, bias=False) # unsqueeze channels
self.bn3 = nn.BatchNorm2d(out_channel*self.expansion)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
def forward(self, x):
identity = x
if self.downsample is not None:
identity = self.downsample(x)
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
out += identity
out = self.relu(out)
return out
class ResNet(nn.Module):
def __init__(self,
block,
blocks_num,
num_classes=1000,
include_top=True,
groups=1,
width_per_group=64):
super(ResNet, self).__init__()
self.include_top = include_top
self.in_channel = 64
self.groups = groups
self.width_per_group = width_per_group
self.conv1 = nn.Conv2d(3, self.in_channel, kernel_size=7, stride=2,
padding=3, bias=False)
self.bn1 = nn.BatchNorm2d(self.in_channel)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, blocks_num[0])
self.layer2 = self._make_layer(block, 128, blocks_num[1], stride=2)
self.layer3 = self._make_layer(block, 256, blocks_num[2], stride=2)
self.layer4 = self._make_layer(block, 512, blocks_num[3], stride=2)
if self.include_top:
self.avgpool = nn.AdaptiveAvgPool2d((1, 1)) # output size = (1, 1)
self.fc = nn.Linear(512 * block.expansion, num_classes)
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
def _make_layer(self, block, channel, block_num, stride=1):
downsample = None
if stride != 1 or self.in_channel != channel * block.expansion:
downsample = nn.Sequential(
nn.Conv2d(self.in_channel, channel * block.expansion, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(channel * block.expansion))
layers = []
layers.append(block(self.in_channel,
channel,
downsample=downsample,
stride=stride,
groups=self.groups,
width_per_group=self.width_per_group))
self.in_channel = channel * block.expansion
for _ in range(1, block_num):
layers.append(block(self.in_channel,
channel,
groups=self.groups,
width_per_group=self.width_per_group))
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
if self.include_top:
x = self.avgpool(x)
x = torch.flatten(x, 1)
x = self.fc(x)
return x
def resnet34(num_classes=1000, include_top=True):
# https://download.pytorch.org/models/resnet34-333f7ec4.pth
return ResNet(BasicBlock, [3, 4, 6, 3], num_classes=num_classes, include_top=include_top)
def resnet50(num_classes=1000, include_top=True):
# https://download.pytorch.org/models/resnet50-19c8e357.pth
return ResNet(Bottleneck, [3, 4, 6, 3], num_classes=num_classes, include_top=include_top)
def resnet101(num_classes=1000, include_top=True):
# https://download.pytorch.org/models/resnet101-5d3b4d8f.pth
return ResNet(Bottleneck, [3, 4, 23, 3], num_classes=num_classes, include_top=include_top)
def resnext50_32x4d(num_classes=1000, include_top=True):
# https://download.pytorch.org/models/resnext50_32x4d-7cdf4587.pth
groups = 32
width_per_group = 4
return ResNet(Bottleneck, [3, 4, 6, 3],
num_classes=num_classes,
include_top=include_top,
groups=groups,
width_per_group=width_per_group)
def resnext101_32x8d(num_classes=1000, include_top=True):
# https://download.pytorch.org/models/resnext101_32x8d-8ba56ff5.pth
groups = 32
width_per_group = 8
return ResNet(Bottleneck, [3, 4, 23, 3],
num_classes=num_classes,
include_top=include_top,
groups=groups,
width_per_group=width_per_group)
# load ImageNet pretrain parameter
def main():
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
my_output_channel = 5
# load pretrain weights
# download url: https://download.pytorch.org/models/resnet34-333f7ec4.pth
model_weight_path = "./resnet34-pre.pth"
assert os.path.exists(model_weight_path), "file {} does not exist.".format(model_weight_path)
# option1
net = resnet34()
net.load_state_dict(torch.load(model_weight_path, map_location=device))
# change fc layer structure
in_channel = net.fc.in_features
net.fc = nn.Linear(in_channel, my_output_channel)
# option2
# net = resnet34(num_classes=my_output_channel)
# pre_weights = torch.load(model_weight_path, map_location=device)
# del_key = []
# for key, _ in pre_weights.items():
# if "fc" in key:
# del_key.append(key)
#
# for key in del_key:
# del pre_weights[key]
#
# missing_keys, unexpected_keys = net.load_state_dict(pre_weights, strict=False)
# print("[missing_keys]:", *missing_keys, sep="\n")
# print("[unexpected_keys]:", *unexpected_keys, sep="\n")