深度学习之目标检测(八)YOLOv3理论介绍
本章学习 YOLO v3 相关理论知识,学习视频源于 Bilibili,部分参考叙述源自 知乎 。
1. YOLO v3
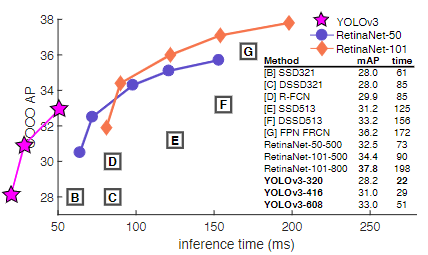
YOLO v2 论文为发表于 2018 CVPR 的 YOLOv3: An Incremental Improvement。YOLOv3 更像是作者一年工作的总结,不像一篇正式的 paper,没有太多创新点,整合了当前主流网络的优点,其核心在于做大做强,再创辉煌。通过在 COCO 数据集上正确率的对比我们可以看出,相比于其他网络而言,YOLOv3 速度非常的快,但是正确率并没有那么高。
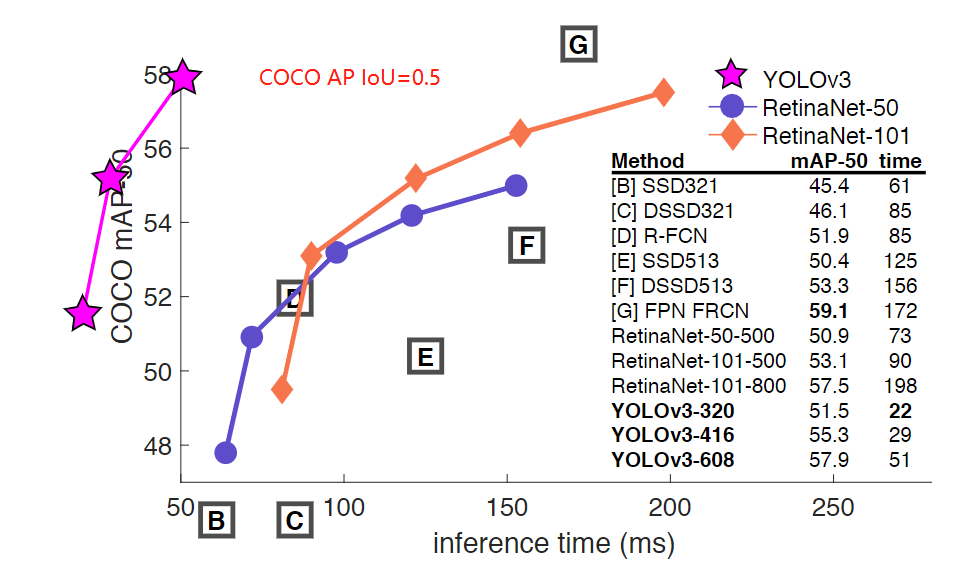
当 IoU=0.5 时候的 AP 对应的是 PASCAL VOC 的评价指标了,可见其检测效果对于其他网络而言还是有竞争力的,且速度奇快无比。
1.1 YOLOv3 网络架构
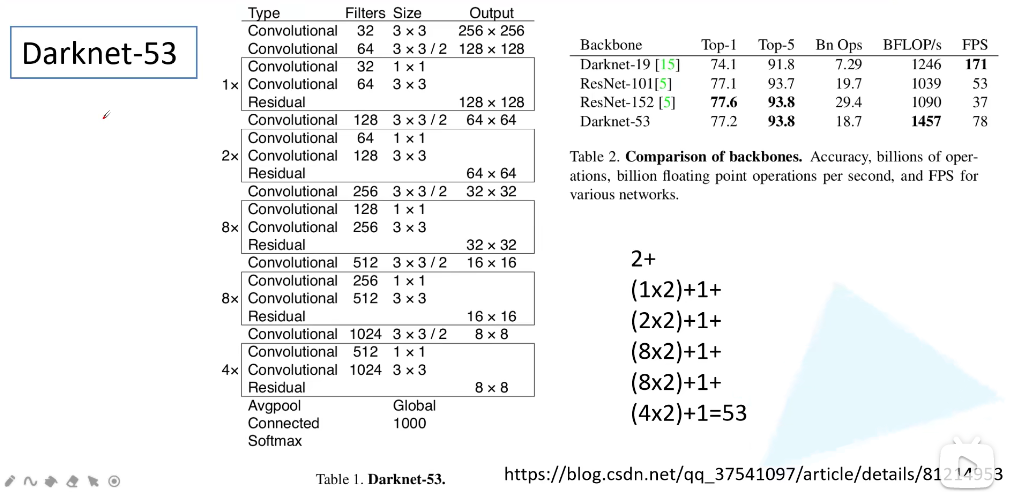
YOLOv3 的第一个改进之处就是将 backbone 替换为 Darknet-53。在 YOLOv2 中采用的是 Darknet-19 这样一个网络。Darknet-53 的 top-1 准确率相较于 Darknet-19 有比较大的提升,与 ResNet 性能相当,但是检测速度 FPS 比 ResNet 要好很多。注意最后的全连接层也是可以通过卷积来实现的,所以最后那里的 Connected 也算了一个卷积层。
什么是 Top-1 和 Top-5 准确率?
模型在 ImageNet 数据集上进行推理,按照置信度排序总共生成 5 个标签。按照第一个标签预测计算正确率,即为 Top-1 正确率;前五个标签中只要有一个是正确的标签,则视为正确预测,称为 Top-5 正确率。
为什么 Darknet-53 比更深层的 ResNet 的效果要好一些呢?
通过看网络结构,和 ResNet 没有太大的区别,都是堆叠一系列的残差结构来得到最终网络的。但是细看在 Darknet-53 中是没有池化层的,所有下采样都是通过卷积层来实现的。那速度为什么这么快呢?Darknet-53 的卷积核个数(通道数)要少一些,网络计算量要少一些。 —— 个人观点仅供参考
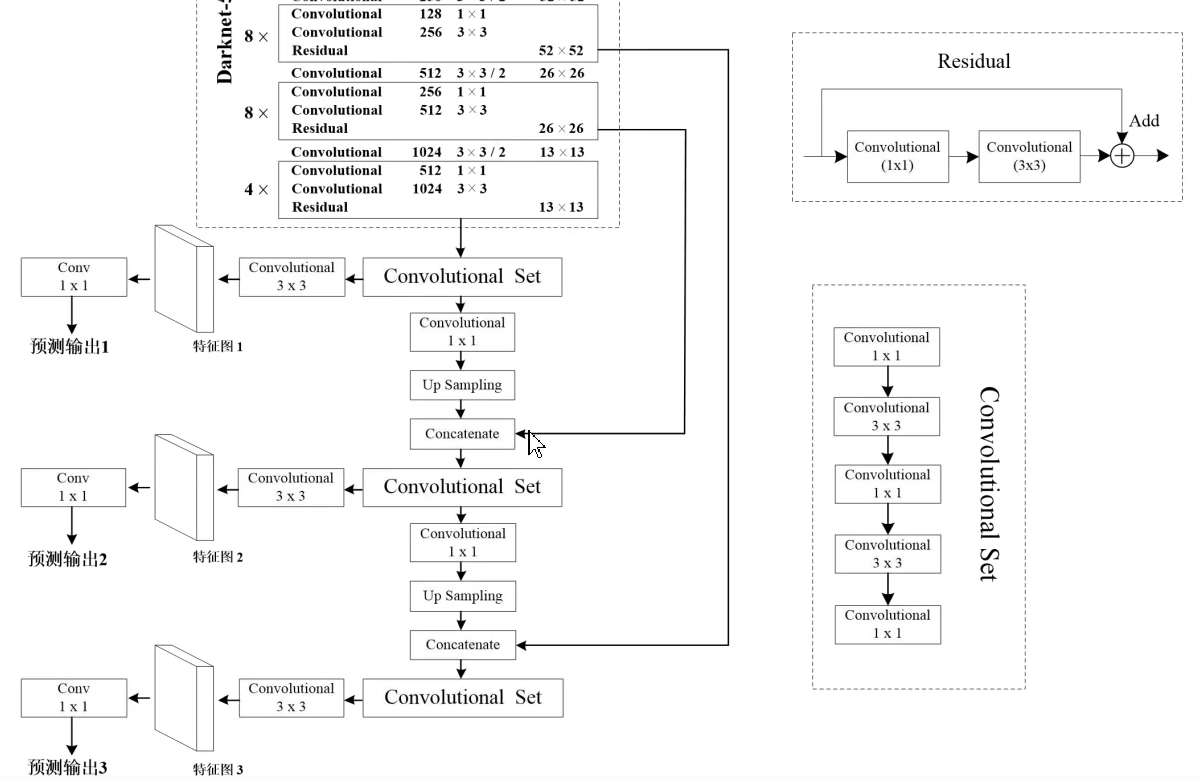
最终整体网络结构如下所示,其实一个 Convolutional 包含三个部分:卷积层,BN层和 LeakyReLU 激活层,因为使用了 BN 层(BN 操作自带偏置),所以卷积层是没有偏置 bias 的。
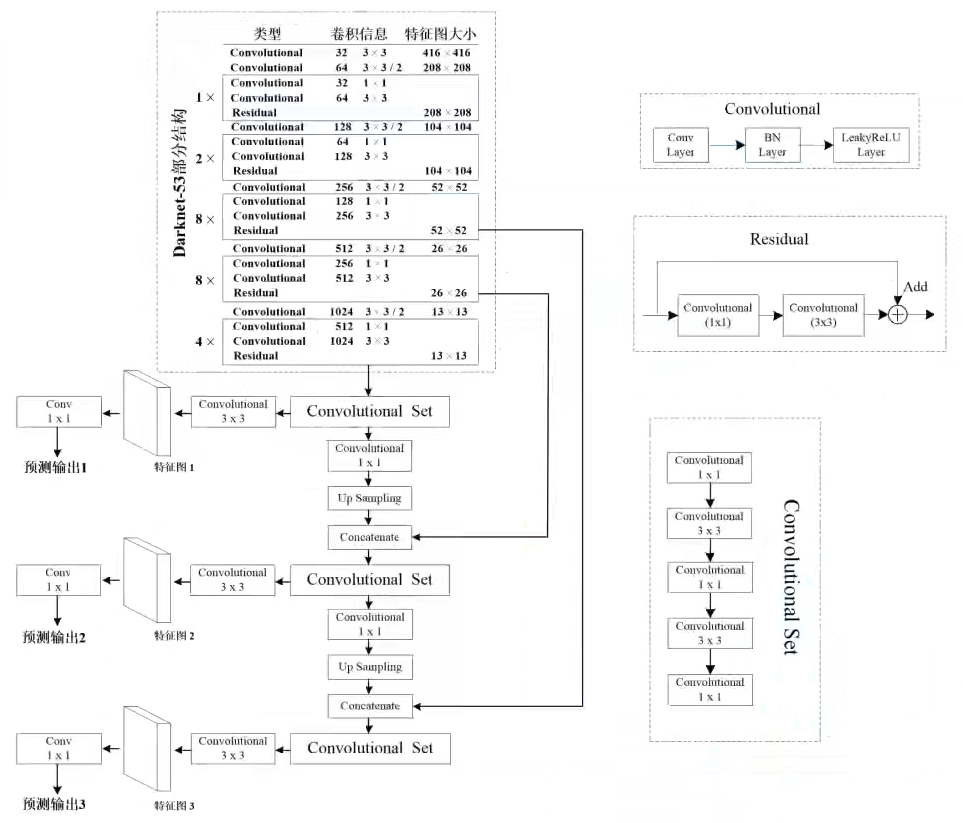
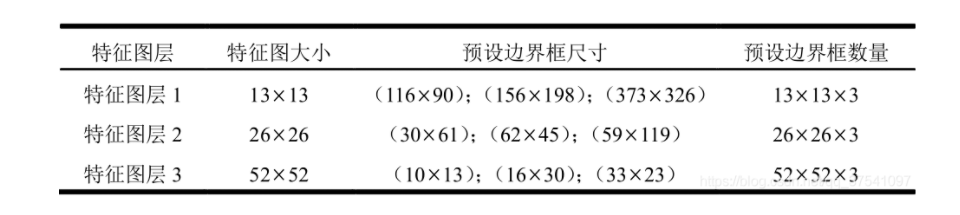
关于 YOLOv3 模型结构部分,其实原始论文讲得非常模糊,比如原始论文中说来自前面的两个层(哪两个?),来自早期的特征层(哪一个?),添加一些卷积层(在哪里添加什么样子的?)。光看论文还不够搭建出来,看源码才能看出来。YOLOv3 其实是在三个预测特征层上进行预测的,每个预测特征层上会使用三种尺度,这也是根据 K-means 算法得到的,得到的九组尺度(下图中左下角部分)三个三个一分就分给了三个预测特征层,依然保持早期特征层预测小目标,后期特征层预测大目标的做法。这些预设的框被称为 bounding box priors,这个和 Anchor 以及 Default box 其实是一个概念。
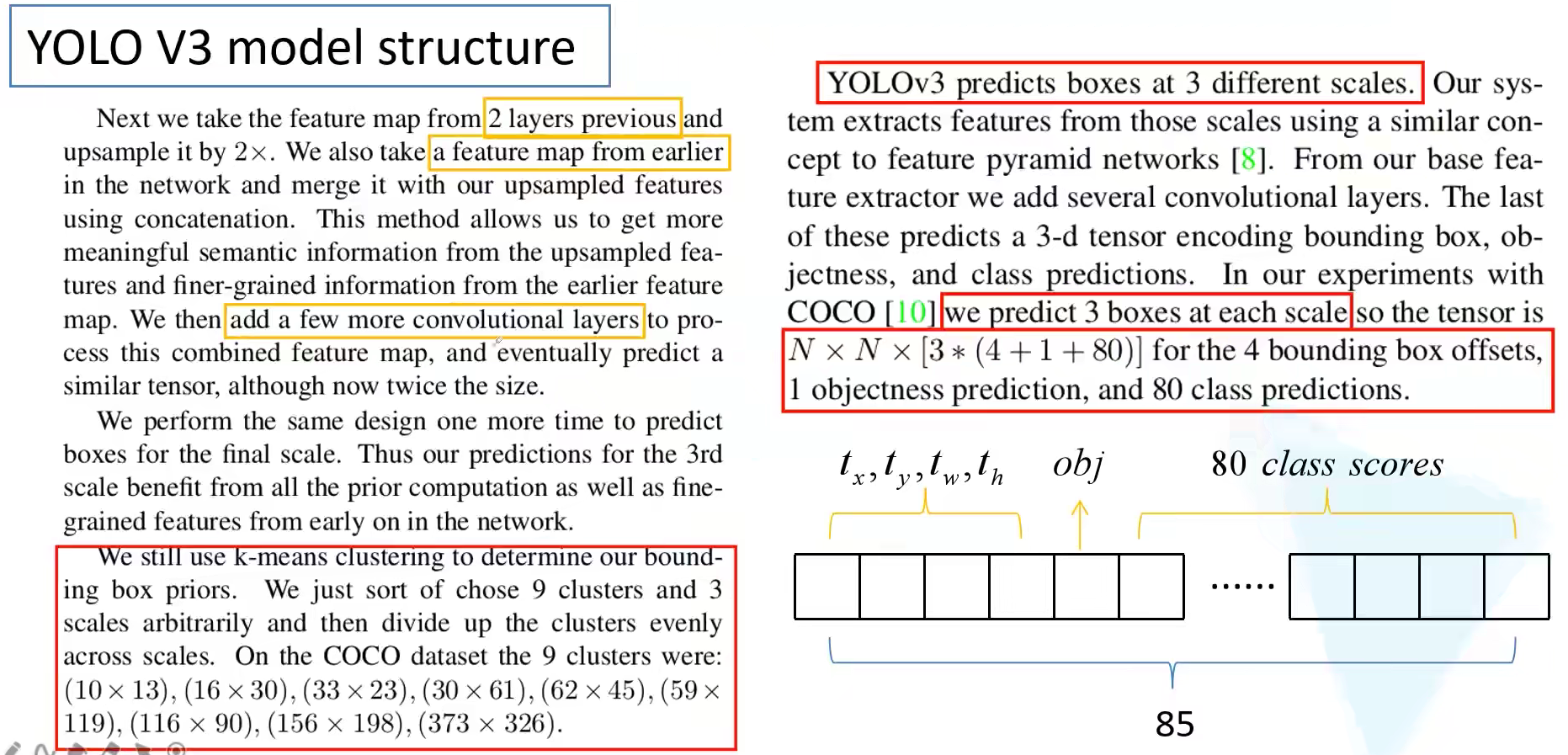
最终在COCO数据集上进行预测,在每一个预测特征层上会预测 $N \times N \times [3 * (4 + 1 + 80)]$ 个参数。
在 YOLO 中,这部分拼接 concatenate 是在通道维度上进行,回忆 FPN 则是在对应元素上做加法! 将拼接后预测特征图的进行预测。预测器 Conv $1 \times 1$ 就是一个卷积层。
1.2 目标边界框预测
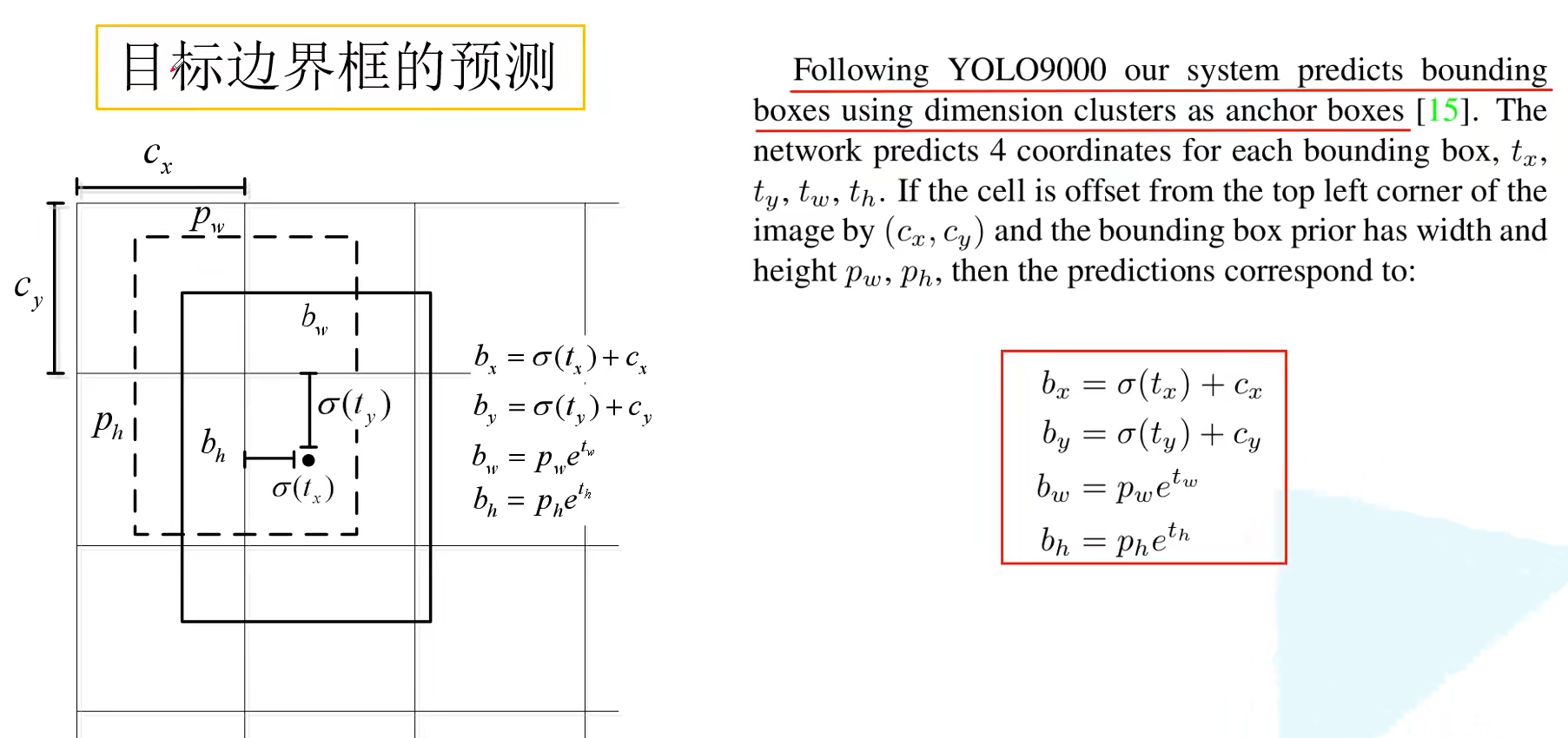
在 YOLOv3 中目标边界框预测和 YOLOv2 其实是一样的。并且使用 k-means 对数据集中的标签框进行聚类,得到类别中心点的 9 个框,作为先验框。在 COCO 数据集中(原始图片全部 resize 为 416 × 416),九个框分别是 (10 × 13),(16 × 30),(33 × 23),(30 × 61),(62 × 45),(59 × 119), (116 × 90), (156 × 198),(373 × 326) ,顺序为 w × h。值得注意的是,先验框只与检测框的尺寸 w、h 有关,与位置 x、y 无关。
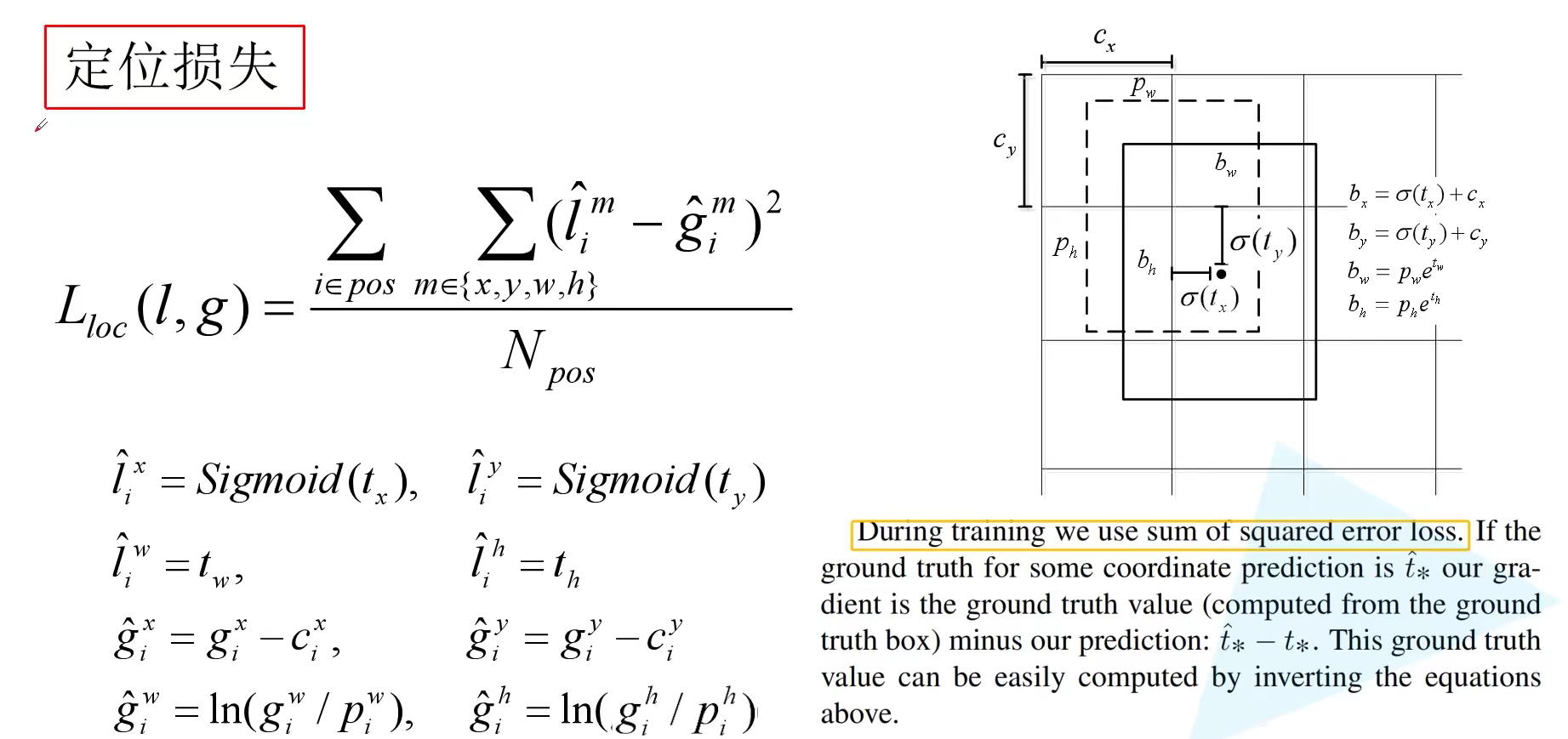
下面这个图和原论文的图其实有一点不一样,因为原论文中写到偏移量其实是相对于 cell 的左上角位置来的,所以下面这个图的虚线框 Anchor 的中心画到了 cell 的左上角,它的中心坐标就是 $(c_x, c_y)$,宽度和高度就是 $P_w$ 和 $P_h$。预测值就是 $t_x, t_y, t_w, t_h$,$\sigma$ 是 sigmoid 函数。通过上述公式,计算出实际预测框的位置以及宽高 $(b_x, b_y, b_w, b_h)$。注意到,confidence 值也需要进行 sigmoid 函数处理归一化到 [0. 1] 中。
·
举个具体的例子,假设对于第二个特征图 16 × 16 × 3 × 85 中的第 [5,4,2] 维,上图中的 $c_y$ 为 5, $c_x$ 为 4,第二个特征图对应的先验框为 (30 × 61),(62 × 45),(59 × 119),prior_box 的 index 为 2,那么取最后一个59 和 119 分别作为先验 $P_w$、先验 $P_h$。这样计算之后的 $b_x, b_y$ 还需要乘以特征图二的采样率 16,得到真实的检测框的 x 和 y 中心坐标位置。最后在进行裁剪确保检测框限定在目标图像内即可。
三个特征图一共可以解码出 8 × 8 × 3 + 16 × 16 × 3 + 32 × 32 × 3 = 4032 个 bounding box 以及相应的类别、置信度。这 4032 个 bounding box,在训练和推理时,使用方法不一样:
- 训练时 4032个 bounding box 全部进行后一步的打标签以及损失函数的计算。
- 推理时,选取一个置信度阈值,过滤掉低阈值 bounding box (其实就是过滤掉背景预测框),再经过 Pr(object) × Pr(class) 获得类别分数,基于类别分数进行 NMS 非极大值抑制,就可以输出整个网络的预测结果了。
YOLOv3 不再像 YOLOv1 和 YOLOv2 那样,每个 cell 负责中心落在该 cell 中的 ground truth。原因是 YOLOv3 一共产生3 个特征图,3 个特征图上的 cell,中心是有重合的。训练时,可能最契合的是特征图 1 的第 3 个 box,但是推理的时候特征图 2 的第 1 个 box 置信度最高。所以 YOLOv3 的训练,不再按照 ground truth 中心点,严格分配指定 cell,而是根据预测值寻找 IOU 最大的预测框作为正例。
Anchor 如何和 Cell 进行匹配?比较位置偏移量是相对于 Cell 左上角而言的。知乎网友有个详细的回答:
求 IOU 和 Anchor 位置无关,只和形状有关,假设一共有 9 种 Anchor,那么找到和 GT 重合最大的那个 Anchor,假设这个 Anchor 属于最后一层 feature map 的第一种 Anchor 形状上,那么然后算出 GT 的中心点落在最后一层 feature map 的对应 cell,然后就是这个 cell 的第一种 Anchor 形状来负责预测它!
1.3 正负样本匹配
在 YOLOv3 中正负样本是如何匹配的呢?对每一个 ground box 会分配一个 bounding box prior,一张图片中有几个 GT 目标,就有几个正样本。并且将与 GT box 重合度最高(IoU 分数最大)的 bounding box prior 作为正样本。对于那些与某个 GT box 重合度超过一定阈值(论文中使用 0.5),但是又不是最大的,则它既不是正样本也不是负样本,直接将其进行丢弃不用于计算损失。对于剩下的样本(与所有 GT box 的 IoU 分数都小于 0.5)则认为是负样本。仅有正样本才有定位损失和类别损失,负样本仅仅用于计算 confidence 值损失。
这里有几个注意点需要强调:
- 预测框一共分为三种情况:正例(positive)、负例(negative)、忽略样例(ignore);
- 正例:任取一个 ground truth,与 4032 个框全部计算 IoU,IoU 最大的预测框,即为正例。与 ground truth 计算后 IoU最大的检测框,但是IOU小于阈值,仍为正例。并且一个预测框,只能分配给一个 ground truth。例如第一个 ground truth 已经匹配了一个正例检测框,那么下一个 ground truth,就在余下的 4031 个检测框中,寻找 IoU 最大的检测框作为正例。这里 ground truth 的先后顺序可忽略。正例产生置信度 loss、检测框 loss、类别 loss。预测框为对应的 ground truth box 标签(需要反向编码,使用真实的 x、y、w、h 计算出真实的 $t_x, t_y, t_w, t_h$ 标签);类别标签对应类别为1,其余为 0;置信度标签为 1 (亦可选择预测边界框与 GT box 的 ioU 分数)。
- 负例:除正例外,与所有 ground truth 的 IoU 都小于阈值(0.5),则为负例。负例只有置信度产生loss,置信度标签为 0。
- 忽略样例:除正例外,与任意一个 ground truth 的 IoU 大于阈值(论文中使用0.5),则为忽略样例,忽略样例不产生任何 loss。
1.4 损失函数
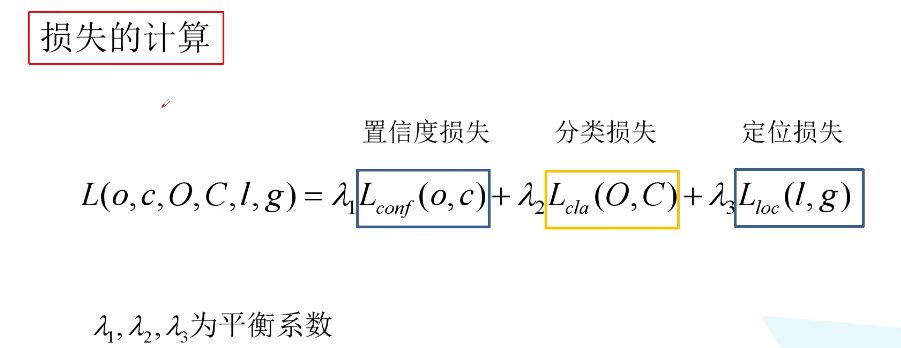
YOLOv3 的损失依然由三部分组成,置信度损失,分类损失以及定位损失。在 YOLOv3 的原始论文中没有给出具体的损失函数公式。
特征图 1 的 Yolov3 的损失函数抽象表达式如下: \(\begin{gathered} \operatorname{los} s_{N_{1}}=\lambda_{b o x} \sum_{i=0}^{N_{1} \times N_{1}} \sum_{j=0}^{3} 1_{i j}^{o b j}\left[\left(t_{x}-t_{x}^{\prime}\right)^{2}+\left(t_{y}-t_{y}^{\prime}\right)^{2}\right] \\ +\lambda_{b o x} \sum_{i=0}^{N_{1} \times N_{1}} \sum_{j=0}^{3} 1_{i j}^{o b j}\left[\left(t_{w}-t_{w}^{\prime}\right)^{2}+\left(t_{h}-t_{h}^{\prime}\right)^{2}\right] \\ -\lambda_{o b j} \sum_{i=0}^{N \times N} \sum_{j=0}^{3} 1_{i j}^{o b j} \log \left(c_{i j}\right) \\ -\lambda_{\text {noobj }} \sum_{i=0}^{N_{1} \times N_{1}} \sum_{j=0}^{3} 1_{i j}^{n o o b j} \log \left(1-c_{i j}\right) \\ \qquad-\lambda_{\text {class }} \sum_{i=0}^{N_{1} \times N_{1}} \sum_{j=0}^{3} 1_{i j}^{o b j} \sum_{c \in \text { classes }}\left[p_{i j}^{\prime}(c) \log \left(p_{i j}(c)\right)+\left(1-p_{i j}^{\prime}(c)\right) \log \left(1-p_{i j}(c)\right)\right] \end{gathered}\) $\lambda$ 为权重常数,控制检测框 Loss、obj 置信度 Loss、noobj 置信度 Loss 之间的比例,通常负例的个数是正例的几十倍以上,可以通过权重超参控制检测效果。$1{ij}^{obj}$ 若是正例则输出 1,否则为0;$1{ij}^{noobj}$ 若是负例则输出 1,否则为 0;忽略样例都输出 0。看着复杂不要怕,我们来一个一个分析:
1.4.1 置信度损失
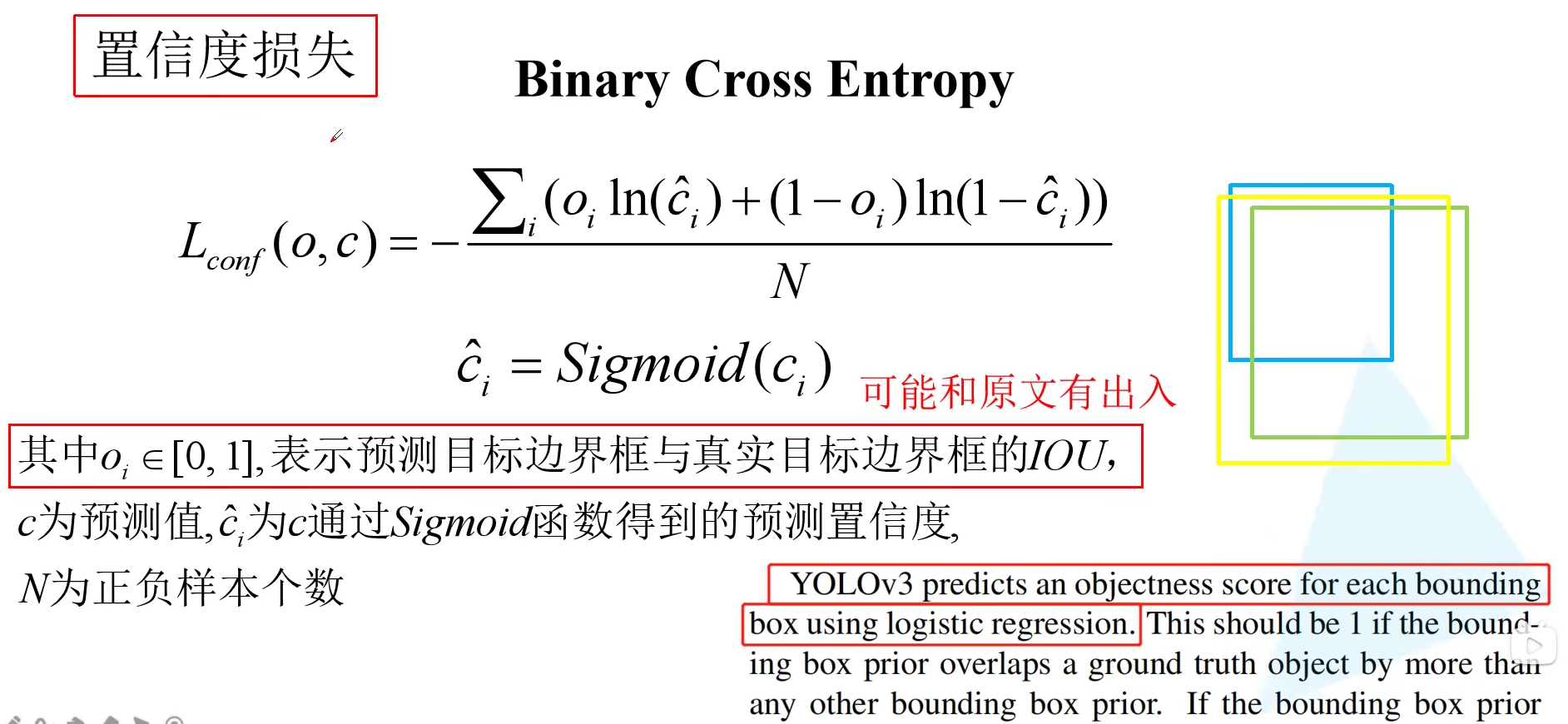
首先是置信度损失,右下角原文写了,对于所有 bounding box 的置信度分数使用逻辑回归,网上一般使用逻辑回归都是使用二值交叉熵损失,包括源码也是使用的二值交叉熵损失。在原文中其实只有 0 和 1 两个值的。但是在 YOLOv3+SPP (下篇博客会讲)中,置信度损失计算部分求得的 $o_i$ 就是预测目标边界框与真实目标边界框的 IoU 值(注意不是 bounding box prior 和 GT box)。假设右边蓝色的部分是 bounding box prior,绿色边界框是 GT box,黄色就是预测的 4 个边界框回归参数作用于蓝色的 bounding box prior 得到预测目标边界框。黄色和绿色的边界框的 IoU 就是 $o_i$ 了。嫌麻烦其实可以直接取 0 和 1。
1.4.2 类别损失
类别损失也是使用二值交叉熵损失,这个与原文表述一致。
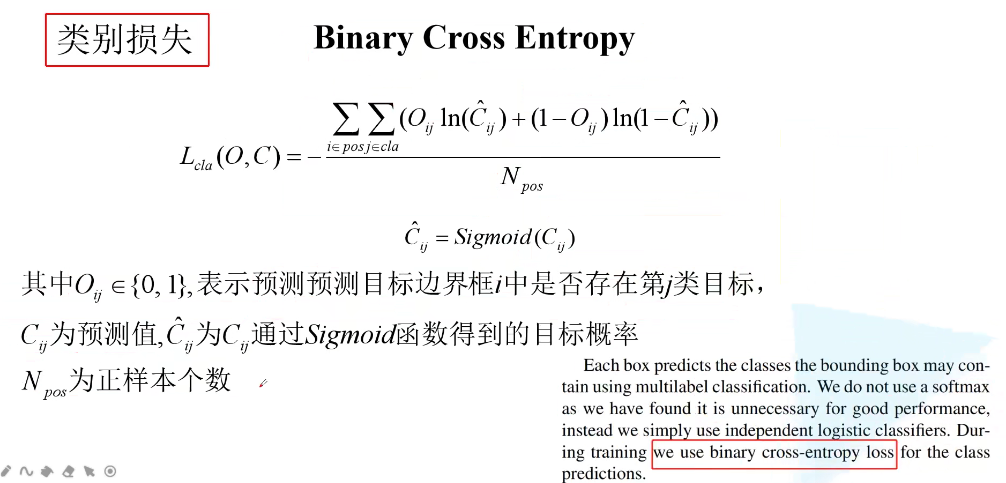
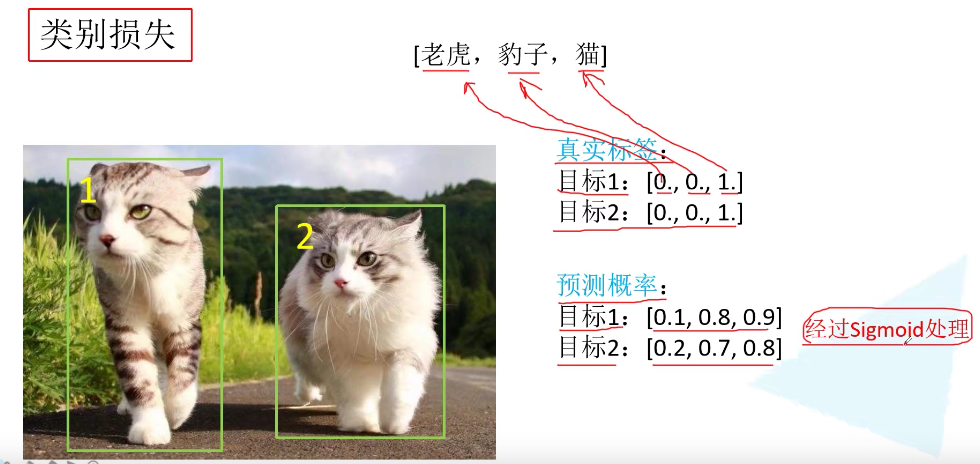
需要注意的是,COCO 数据集有 80 个类别,所以类别数在 85 维输出中占了 80 维,每一维独立代表一个类别的置信度。作者使用 Sigmoid 激活函数替代了 YOLOv2 中的 softmax,取消了类别之间的互斥,可以使网络更加灵活。但是经过 Sigmoid 处理可能出现认为目标既是猫又是狗的情况(两个概率都大于 0.5)。所以 80 个概率之和并不是等于 1 的。
上述公式是否正确呢?通过实践其实可以检验,关于 PyTorch 官方对于 BCELoss 的描述可以参见 此处:
import torch
import numpy as np
loss = torch.nn.BCELoss(reduction="none") # reduction="none" 不进行求均值处理
po = [[0.1, 0.8, 0.9], [0.2, 0.7, 0.8]]
p = torch.tensor(po)
p.requires_grad_()
go = [[0., 0., 1.], [0., 0., 1.]]
g = torch.tensor(go)
l = loss(input = p, target = g)
print(np.round(l.detach().numpy(), 5)) # detach() 去除梯度信息
print("------------------------------")
def bce(c, o):
return np.round(-(o * np.log(c) + (1 - o) * np.log(1 - c)), 5)
pn = np.array(po)
gn = np.array(go)
print(bce(pn, gn))
'''
[[0.10536 1.60944 0.10536]
[0.22314 1.20397 0.22314]]
------------------------------
[[0.10536 1.60944 0.10536]
[0.22314 1.20397 0.22314]]
'''
1.4.3 定位损失
论文中写道,在训练过程中使用平方差损失。也可以使用出自 Faster R-CNN 的 smooth L1 loss,smooth L1可以使训练更加平滑。在 YOLOv3+SPP 中定位损失会使用 GIOU。