深度学习之目标检测(三)FPN结构详解
本章学习 FPN 相关知识,学习视频源于 Bilibili。
1. FPN —— 特征金字塔
FPN 原始论文为发表于 2016 CVPR 的 Feature Pyramid Networks for Object Detection。针对目标检测任务,主要解决的问题是目标检测在处理多尺度变化问题时的不足,最终在COCOAp 提升 2.3 个点,pascalAP 提升3.8 个点。
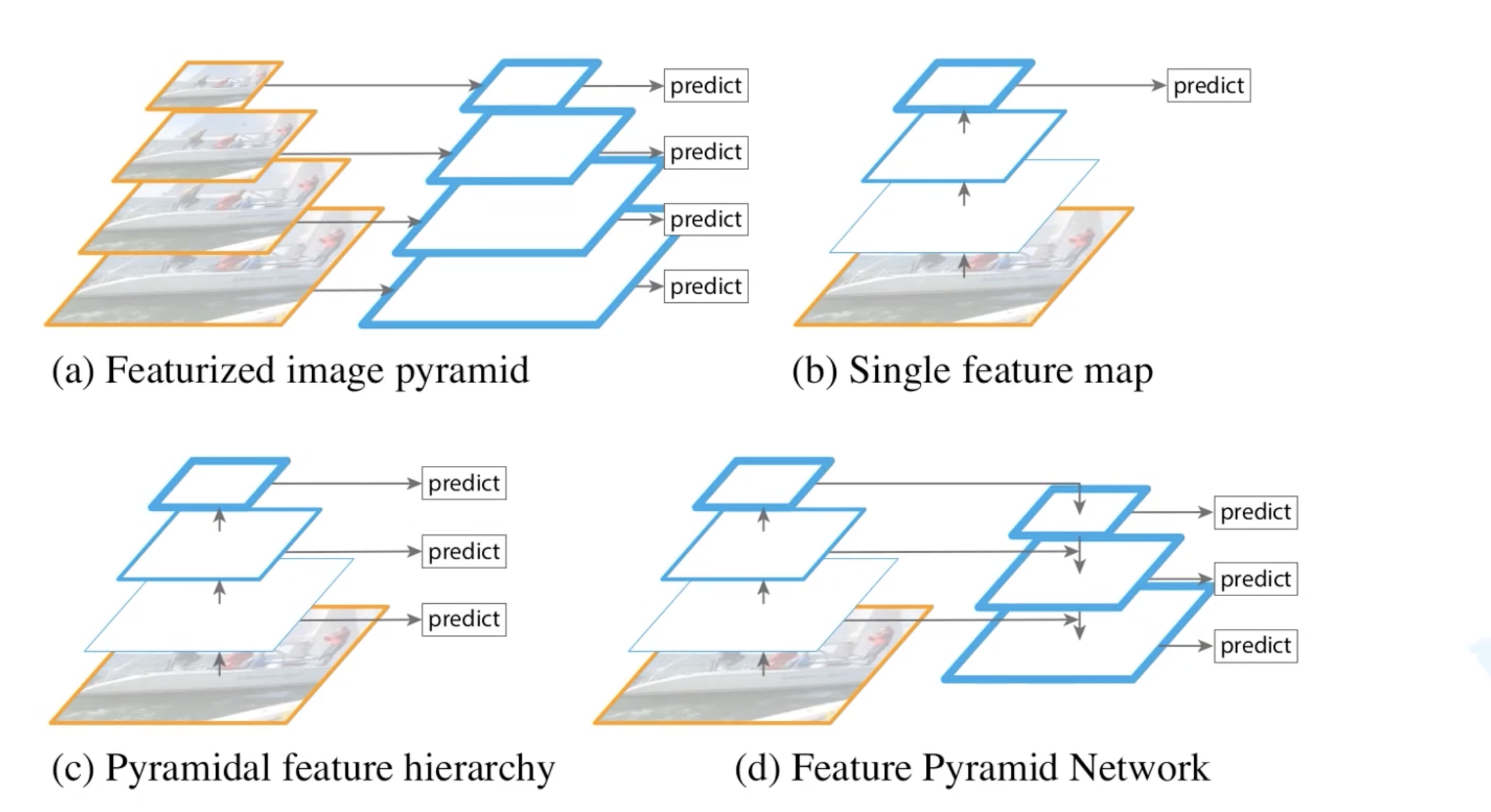
下图是原论文中给出的四幅结构对比图:
- 图(a)是特征图像金字塔结构,在传统的图像处理中很常见(为了处理物体大小差异十分明显的检测问题,经典的方法是利用图像金字塔的方式进行多尺度变化增强,但这样会带来极大的计算量)。生成多少个不同的尺度就会重新预测多少次,这样效率是很低的。
- 图(b)是 Faster RCNN 采用的一种方式,由 backbone 得到最终的特征图。在最终的特征图上进行预测。这种方法针对小目标的预测结果并不是很好。
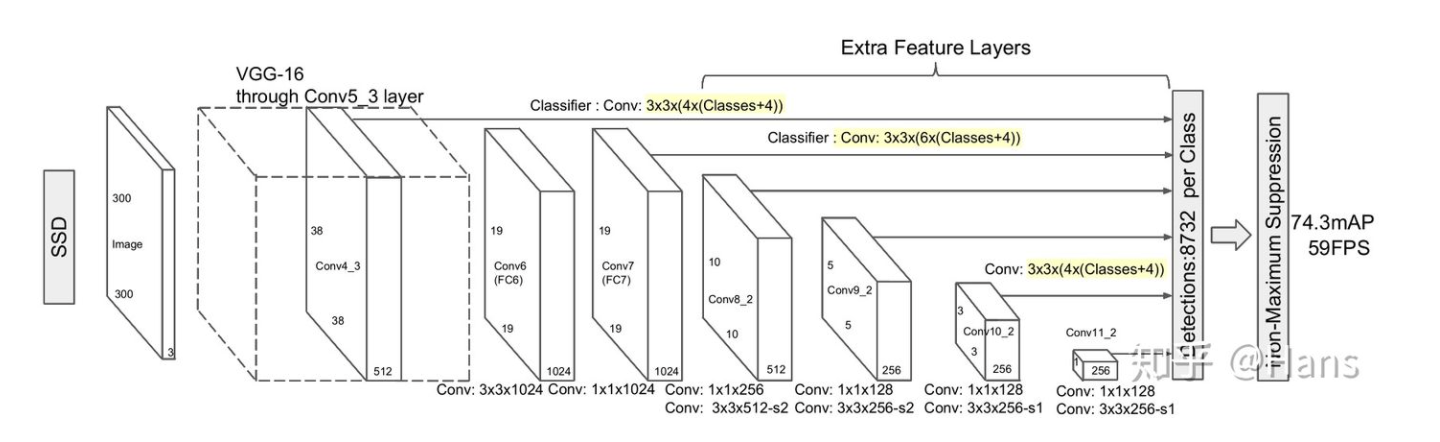
- 图(c)和之后要讲的SSD算法很类似。首先还是将图片输入给 backbone,会在 backbone 得到的不同特征图上分别进行预测。SSD真实网络结构如下:
- 图(d)是FPN结构,不是简单的在 backbone 的不同特征图上进行预测,会将不同特征图上的特征进行融合,在融合之后得到的特征图上再进行预测。实现能在增加极小的计算量的情况下,处理好物体检测中的多尺度变化问题。
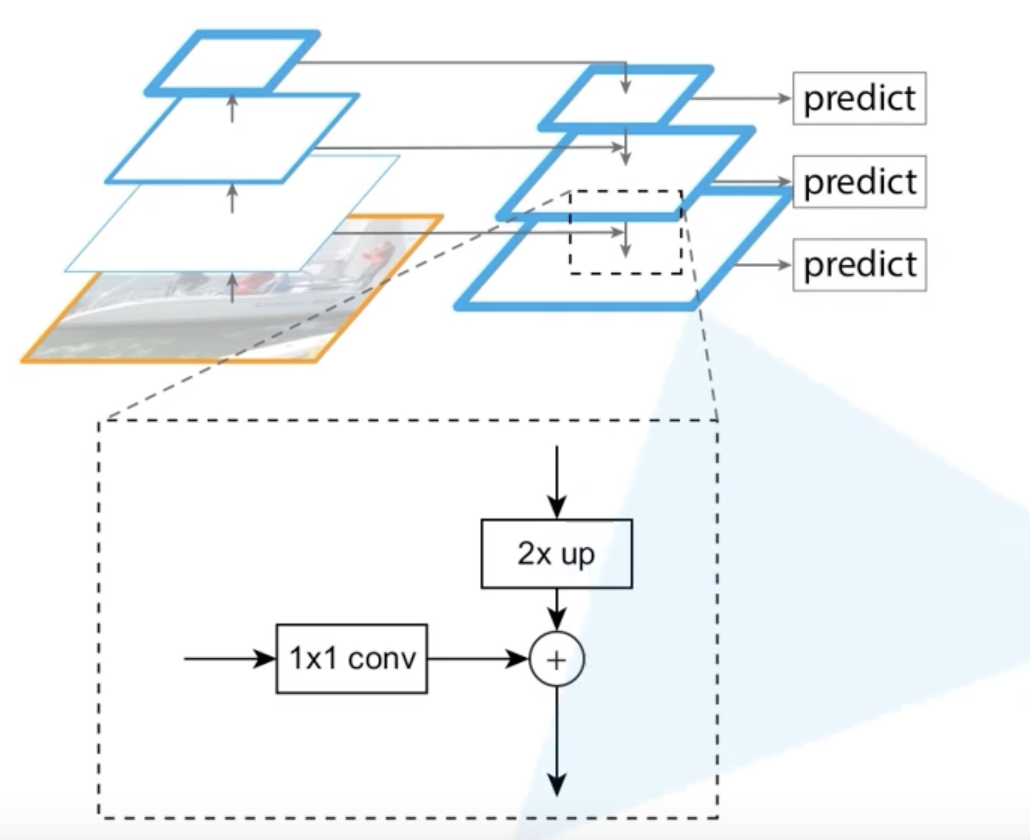
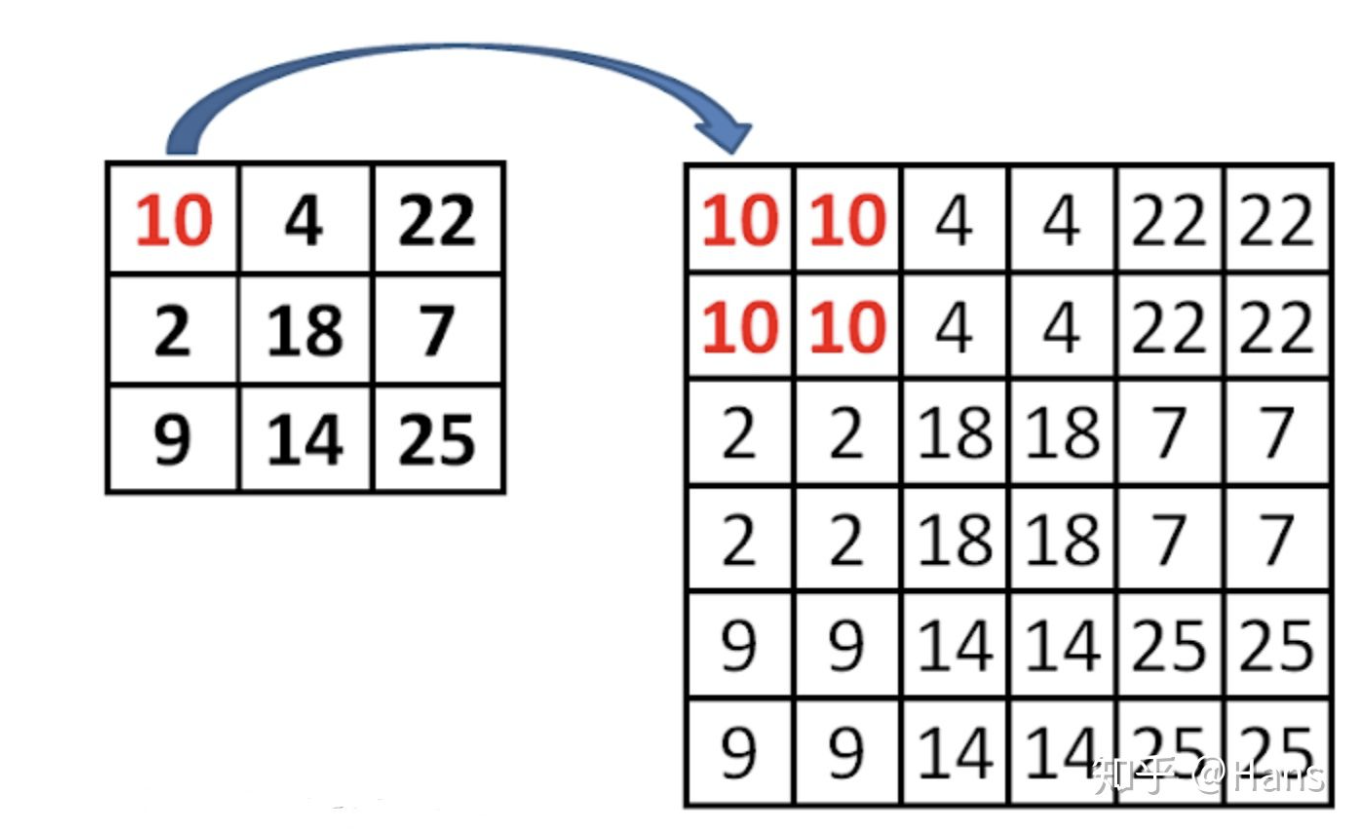
原论文中细节部分如下所示,针对每一个 backbone 上的特征图,先使用 $1 \times 1$ 的卷积核进行处理。原始论文中 $1 \times 1$ 卷积核的个数为 256,即最终得到的特征图的 channel 都是 256。$1 \times 1$ 卷积核的主要目的是为了调整 backbone 上不同特征图的 channel,因为后面能够融合需要保证相同的 shape。2 倍上采样的具体实现方法则是简单的最近邻插值算法。pytorch 官方实现的代码就是使用插值算法,模式是最近邻算法。
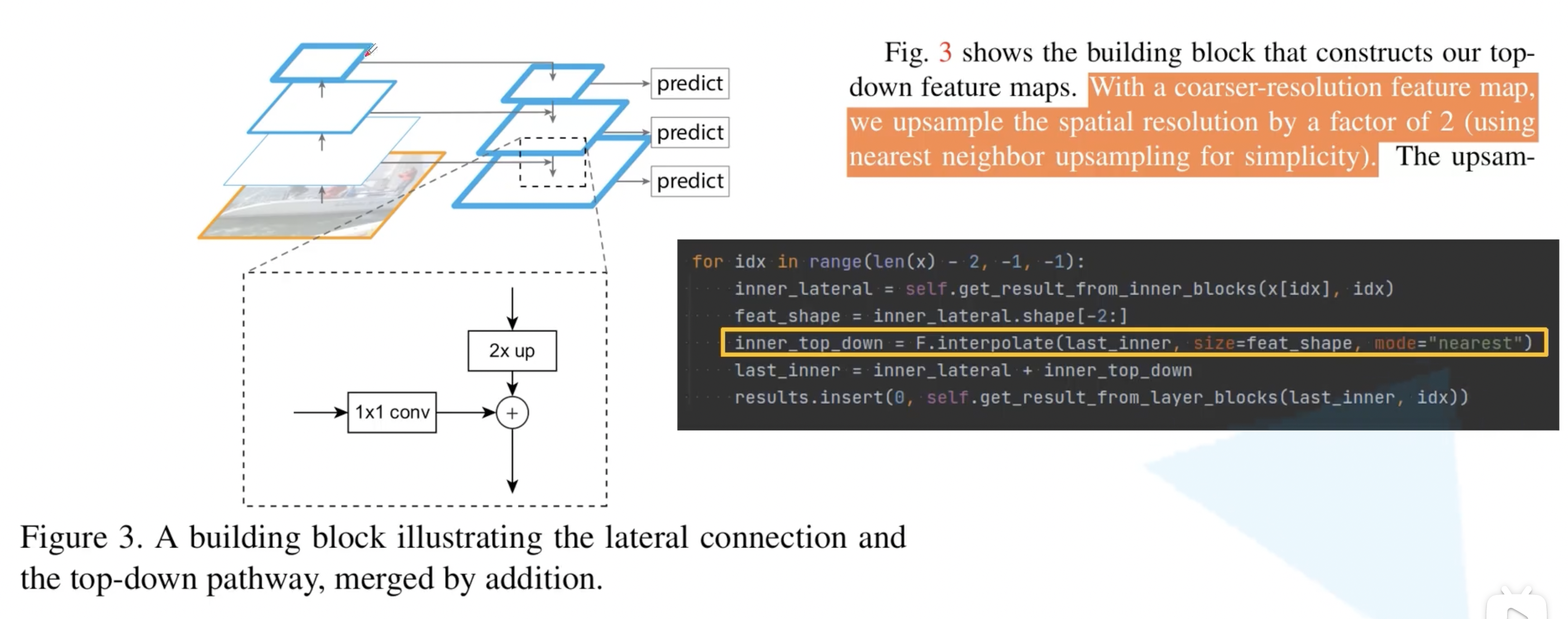
为什么使用最近邻差值而不是双线性差值?知乎对最近邻差值有一个回答不置可否。
对于使用最近邻插值法的个人思考:使用最近邻值插值法,可以在上采样的过程中最大程度地保留特征图的语义信息(有利于分类),从而与 bottom-up 过程中相应的具有丰富的空间信息(高分辨率,有利于定位)的特征图进行融合,从而得到既有良好的空间信息又有较强烈的语义信息的特征图。
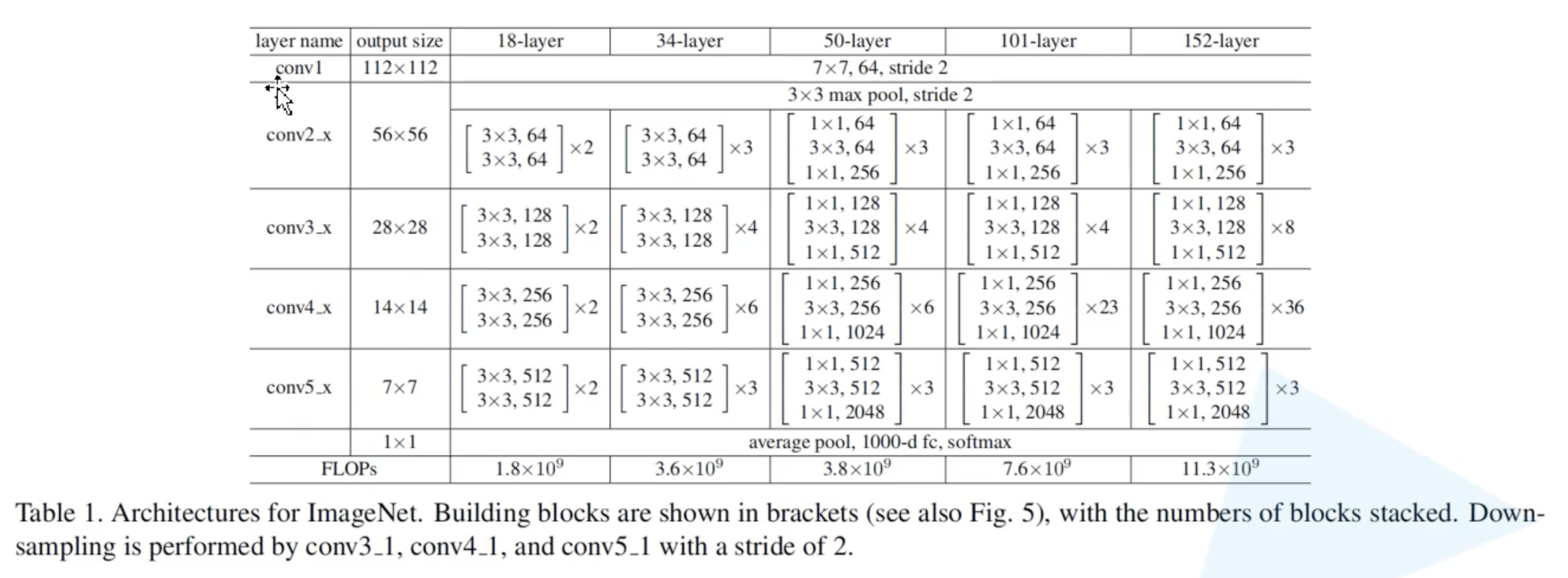
更完整的FPN结构图如下所示,resNet50 的结构也展现在下方。从下图可见,得到的新的融合特征图还需要经过一个 $3 \times 3$ 的卷积对融合后的特征图进行进一步融合。在原论文描述中,将在 P5 的基础上进行一个下采样(pytorch 官方直接使用的是 maxpooling,但是是 $1 \times 1$ 的,通过步距为 2 实现的下采样)。
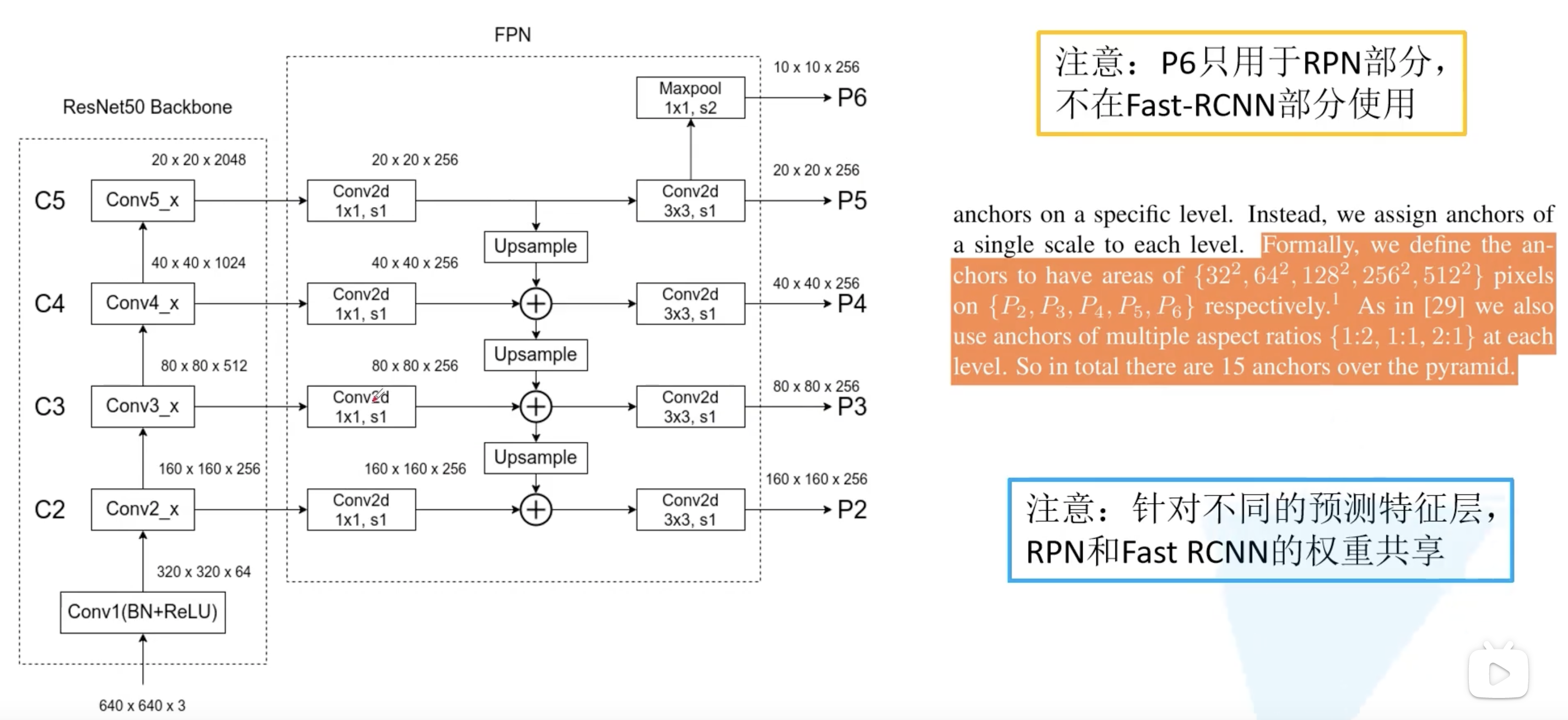
值得注意的是,P6 仅用于 RPN 部分,不用于 Fast R-CNN 部分。即 RPN 在 P2~P6 上给出 proposal,然后将 proposal 映射到 P2~P5 上输入 Fast R-CNN。
还需要强调的点是,由于我们在 FPN 网络中生成了多个预测特征层,所以可以在不同的预测特征层上去分别针对不同尺度的目标进行预测。之前在讲 Faster R-CNN 的时候,我们只有一个预测特征层,所以在一个预测特征层上去生成不同面积以及不同比例的 anchor。但是在 FPN 中,对于不同的预测特征层会针对不同的面积。例如对于 P2,他是相对较低层的预测特征层,会保留更多的底层细节信息,更适合预测小型的目标,所以会将面积为 $32^2$,比例为 1:2,1:1,2:1 的 anchor 在 P2 上进行生成。同理在 P3 上生成 $64^2$ 面积的不同比例的 anchor… 最后面积为 $512^2$ 的anchor 在 P6 生成(这也是和 Faster R-CNN稍微有点不同的地方)。
我们有多个不同的预测特征层,是否需要对不同的预测特征层都去使用一个不同的 RPN 和一个不同的 Fast R-CNN 的模块呢?作者其实做了实验。原论文提到,使用同一个 RPN 和 Fast R-CNN 和 分别在不同的预测特征层上使用不同的 RPN 和不同的 Fast R-CNN 在最终的检测精度上其实并没有什么差异。所以去共享权重是最好的,这样就可以减少网络训练参数,也能减少网络的大小,提升训练速度。
至此我们能看到,相较于 Faster R-CNN,增加 FPN 后实际增加的计算量很小。
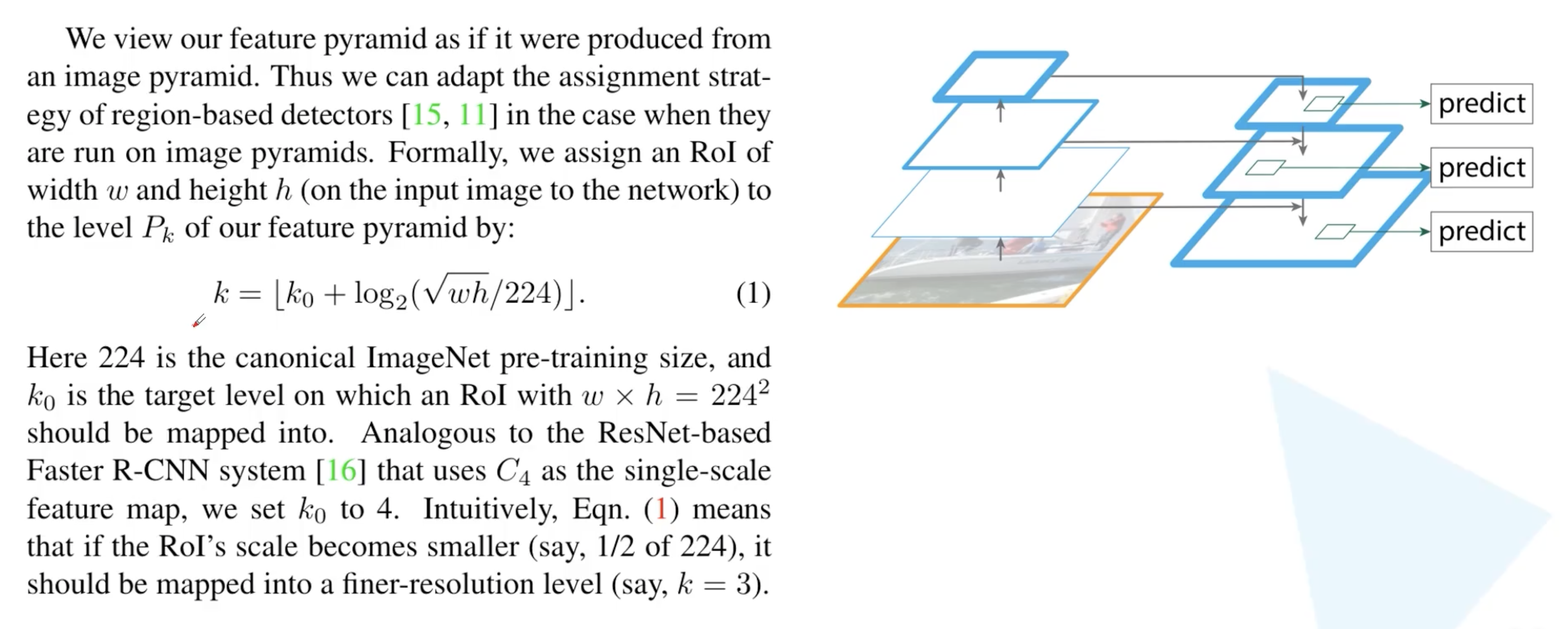
最后还有一个问题:如何知道预测的 proposal 应该映射到哪一个特征图上呢?
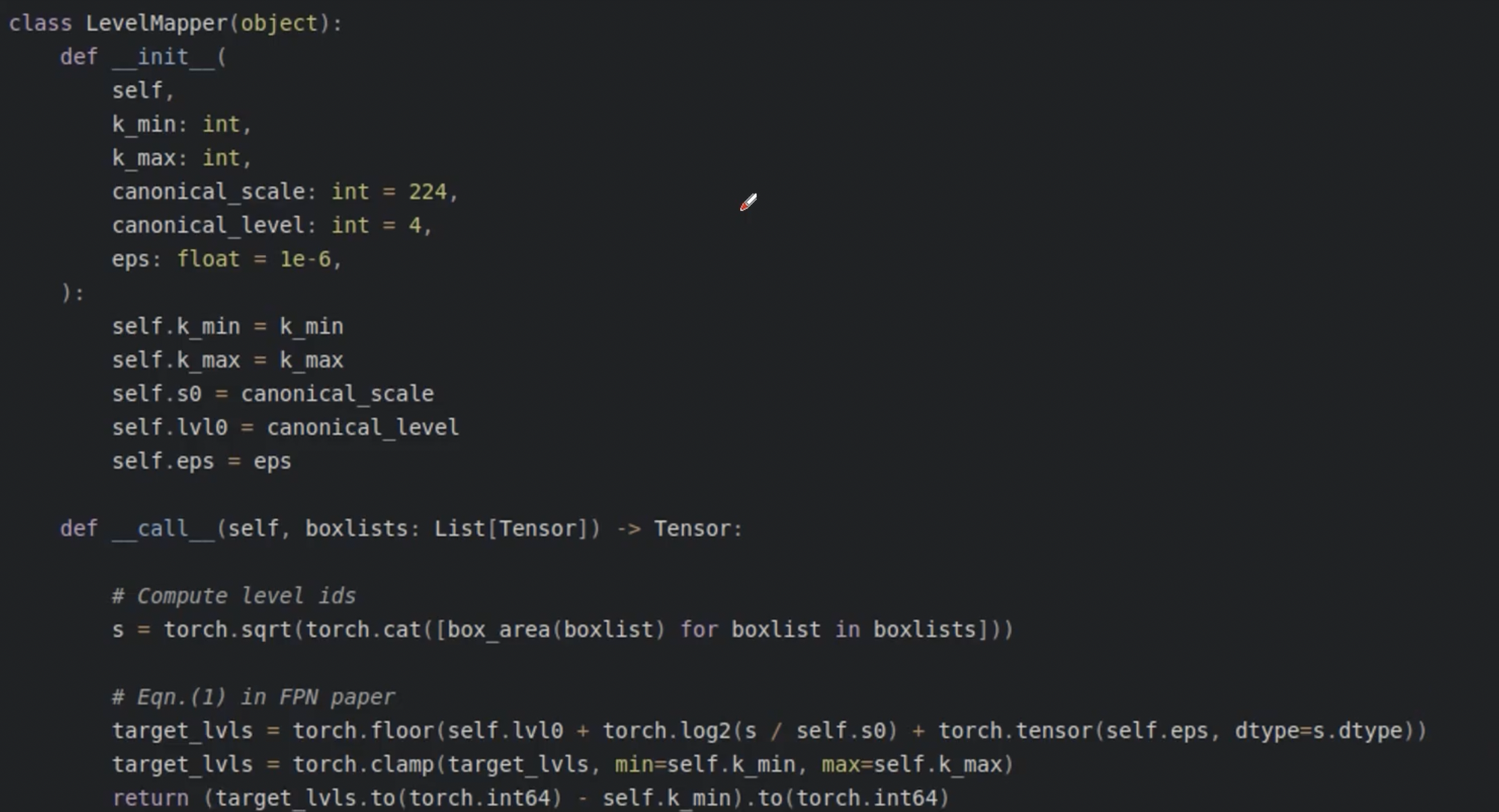
作者将特征金字塔视作图像金字塔生成出来的,并给出了一个公式: \(k=\left\lfloor k_{0}+\log _{2}(\sqrt{w h} / 224)\right\rfloor\) 其中 $k$ 是计算得到的最终在哪一个预测特征层上,$k$ 对应着 P2~P5,所以数值就是 2,3,4,5。$k_0$ 的设置是为 4 的。$w$ 和 $h$ 是 RPN 预测得到的一系列 proposal 在原图上的宽度和高度。如果$w$ 和 $h$ 在原图上都等于 224 的一半,也就是 112 的话,此时 $k$ 计算出来就是 4-1=3。也就是越小的目标,$k$ 越小。
使用同一个 RPN 和 Fast R-CNN 和 分别在不同的预测特征层上使用不同的 RPN 和不同的 Fast R-CNN 在最终的检测精度上其实并没有什么差异,这也说明不同层级之间的特征有相似的语义层次。这和特征金字塔网络的初衷一致。我想这也是为什么作者将特征金字塔视作图像金字塔生成出来的,从而回答了如何知道预测的 proposal 应该映射到哪一个特征图上这一问题。
最后贴上 pytorch 官方给出的每个 proposal 应该映射到那个预测特征层的计算代码。其中 box_area 就是把宽和高进行相乘,再通过 sqrt 进行开根。$\log_2$ 和 self.s0 就对应着 log 操作和 224。self.lvl0 对应的就是 $k_0$。floor 就是向下取整。整个代码在 torchvision/ops/poolers.py 中的 LevelMapper 类。