深度学习之目标检测(二)Faster R-CNN理论
本章学习 Faster R-CNN理论相关知识,学习视频源于 Bilibili。
1. R-CNN (Region with CNN feature)
Faster-RCNN 是从 R-CNN 到 Fast R-CNN,再到的 Faster R-CNN。R-CNN 可以说是利用深度学习进行目标检测的开山之作。其原始论文:Rich feature hierarchies for accurate object detection and semantic segmentation。
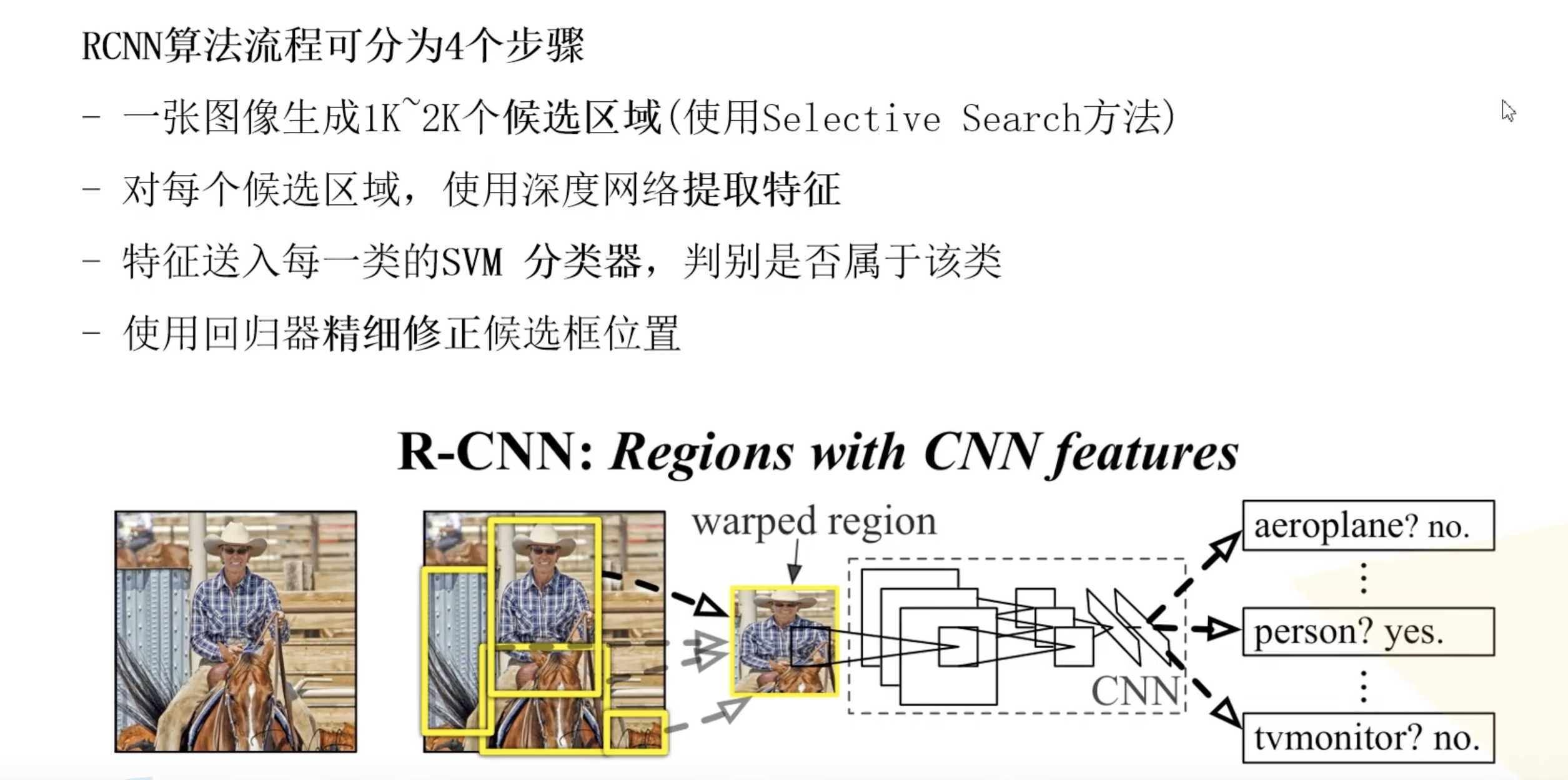
R-CNN 算法流程分四个步骤:
- 一张图像生成1k~2k个候选区域(使用 Selective Search 方法)
- 对每个候选区域,使用深度网络(图片分类网络)提取特征
- 特征送入每一类SVM分类器,判断是否属于该类
- 使用回归器精细修正候选框位置。(使用 Selective Search 算法得到的候选框并不是框得那么准)
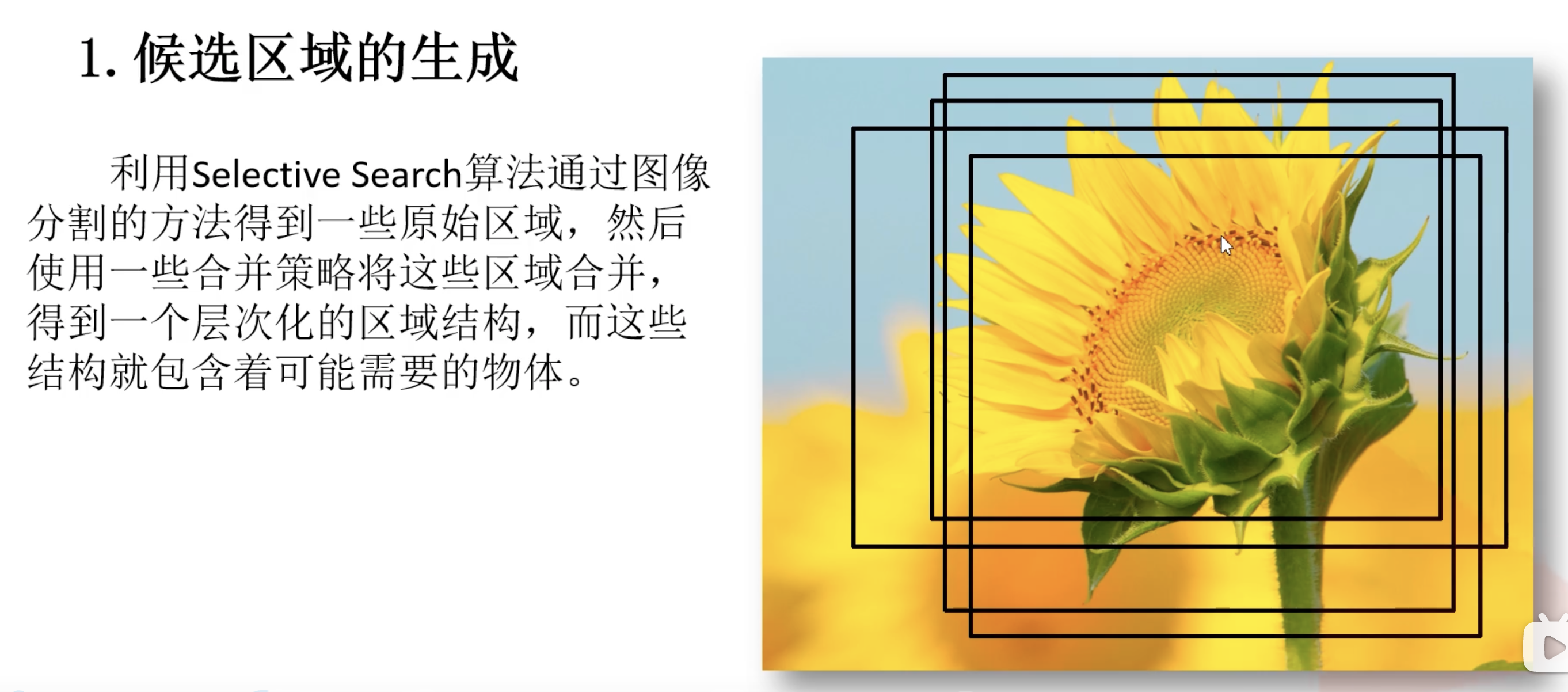
1.1 候选区域的生成
利用 Selective Search 算法通过图像分割的方法得到一些原始区域,然后利用一些合并策略将这些区域合并,得到一些层次化的区域结构,而这些结构就包含着可能需要的物体。这里的 SS 算法可以详见 此处,算法原始论文Selective Search for Object Recognition。(初始区域的获取是引用另一篇论文的:Efficient Graph-Based Image Segmentation)
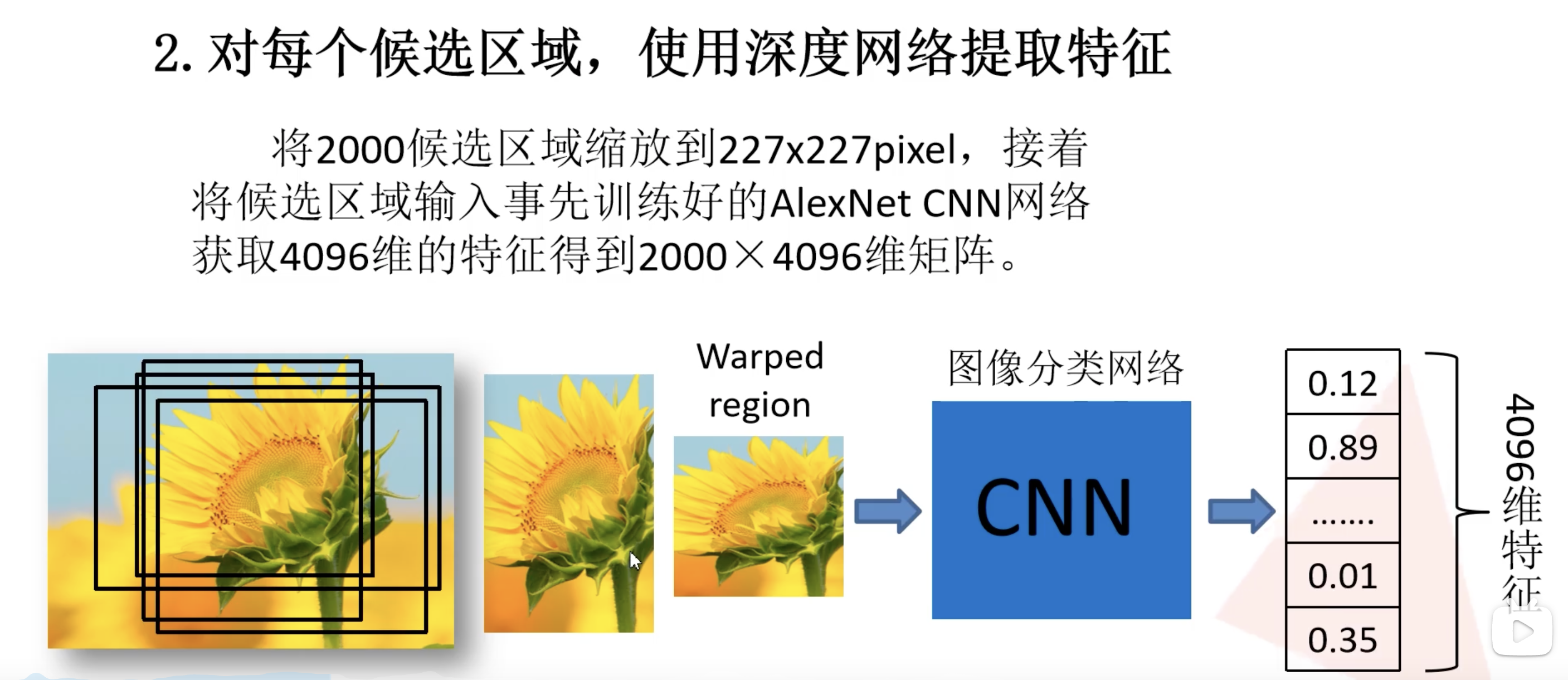
1.2 对每个候选区域使用深度网络提取特征
将2000个候选区域缩放为 $227 \times 227$ pixel,接着将候选区域输入事先训练好的 AlexNet CNN 网络获取 4096 维的特征得到 $2000 \times 4096$ 的特征矩阵。(将后面的全连接层去除就得到了特征提取网络)
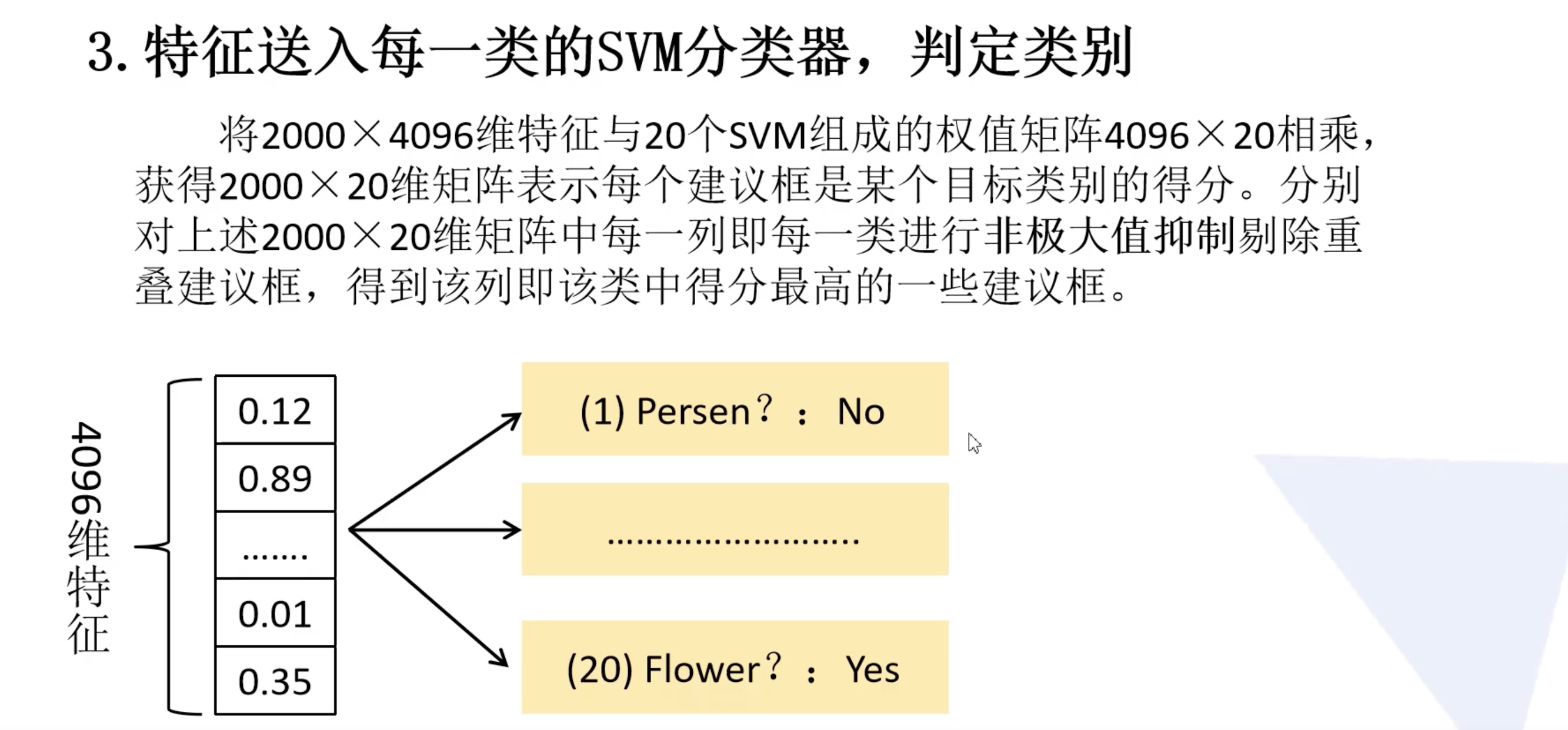
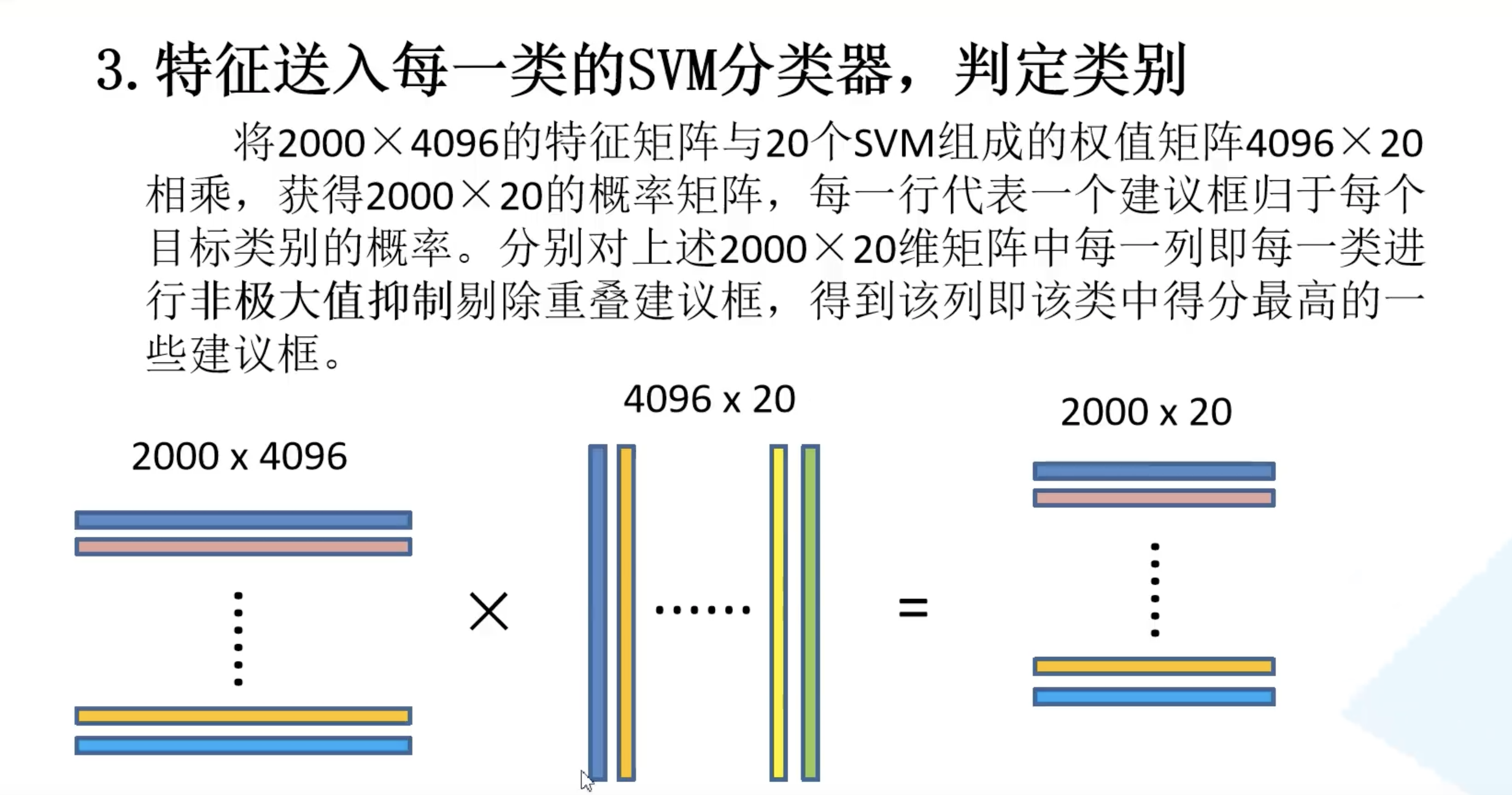
1.3 特征送入每一类的SVM分类器,判定类别
将得到 $2000 \times 4096$ 维特征与20个SVM组成的权值矩阵 $4096 \times 20$ 相乘,获得 $2000 \times 20$ 维矩阵表示每个建议框是某个类别的得分。对上述 $2000 \times 20$ 维矩阵中每一列即每一类进行非极大值抑制剔除重叠建议框,得到该列即该类中得分最高的一些建议框。
非极大值抑制的实现可见下图,首先找到得分最高的候选框,然后计算其他同类候选框与之的iou,删除所有iou大于阈值的候选框,然后下一个目标等等(极大值对应着重叠区域):
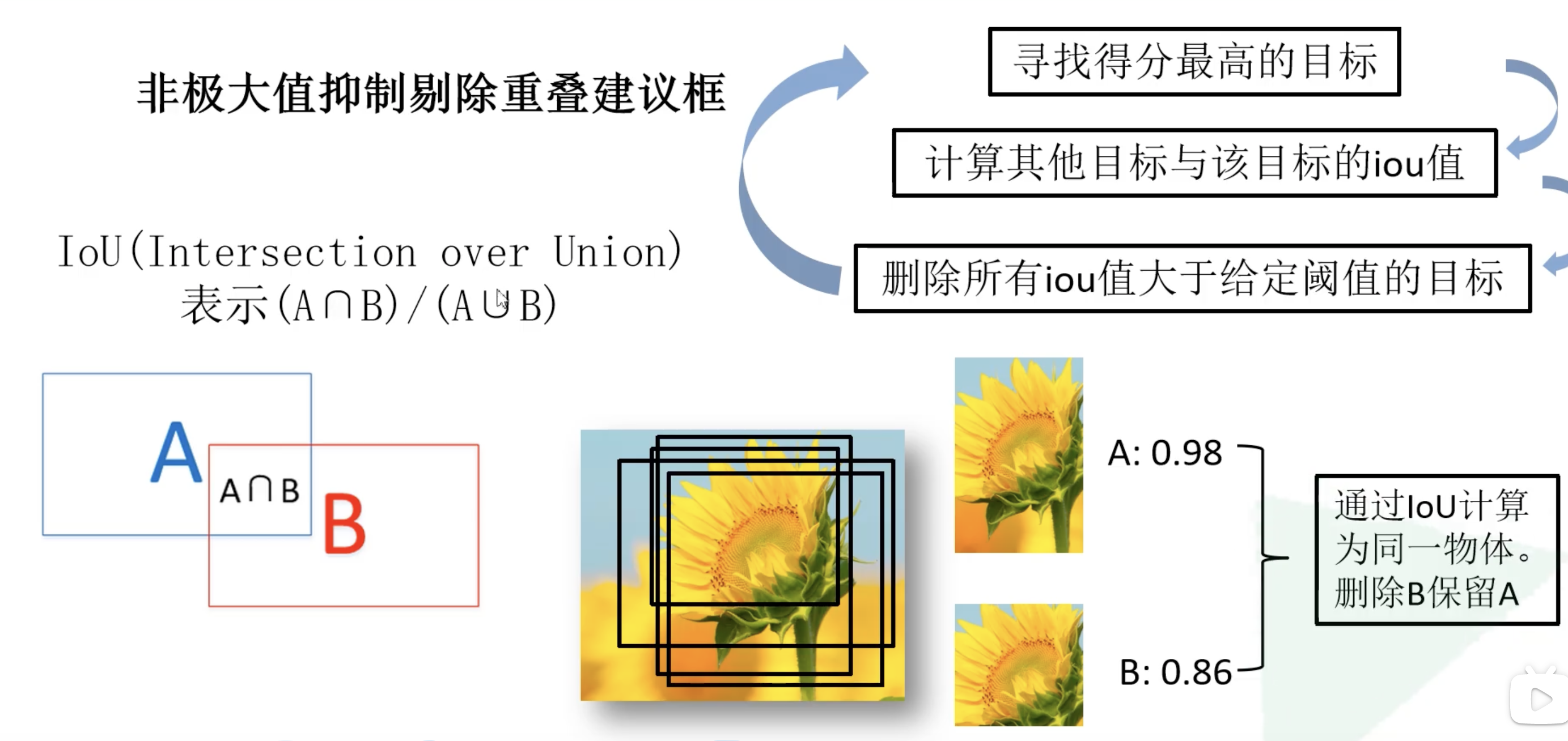
对 $2000 \times 20$ 维矩阵中每一列即每一类进行非极大值抑制,则可以剔除重叠建议框,保留高质量的建议框!
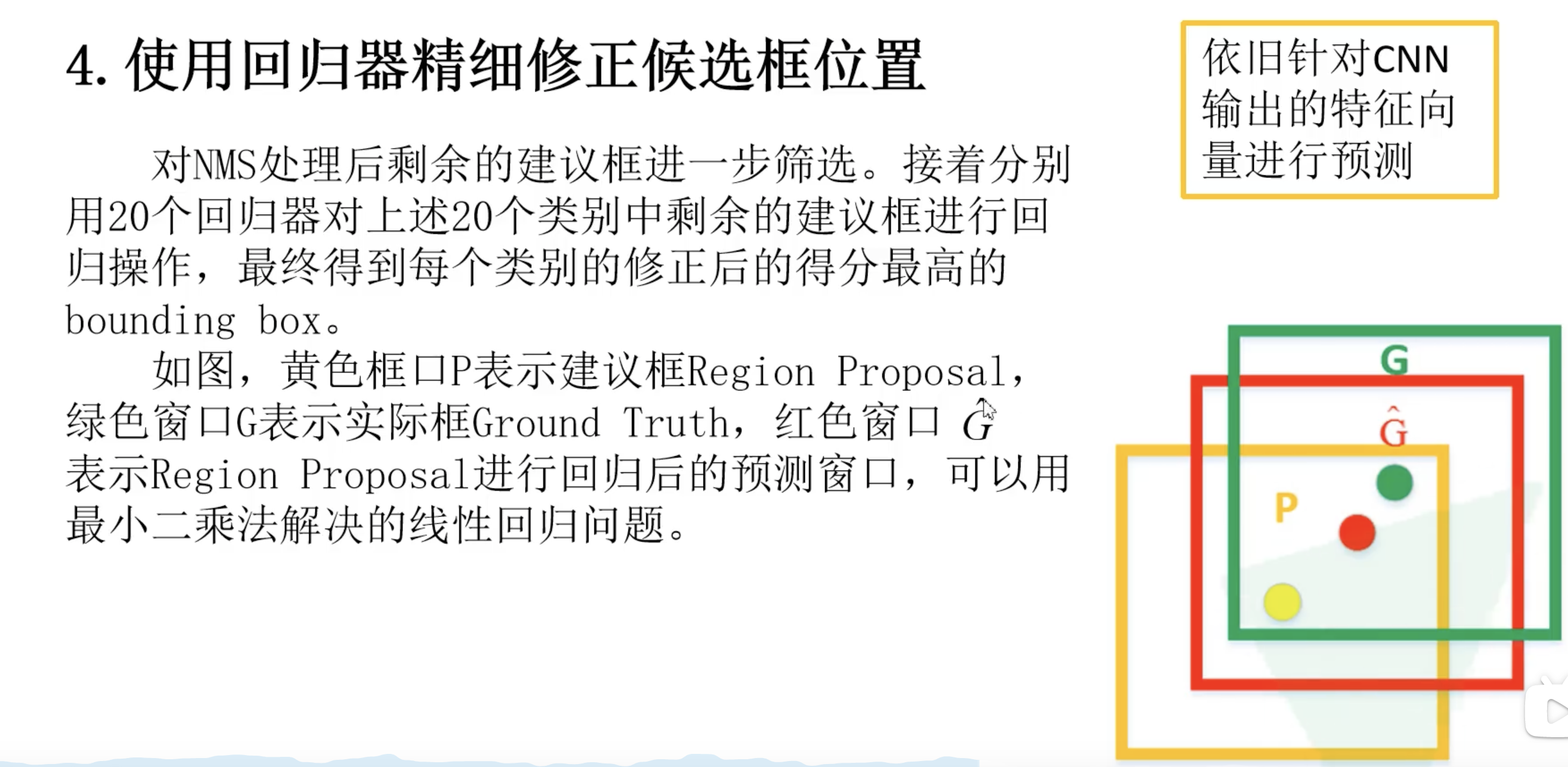
1.4 使用回归器精细修正候选框位置
对 NMS(非极大值抑制)处理后剩余的建议框进行进一步筛选。接着分别用 20 个回归器对上述 20 个类别中剩余的建议框进行回归操作,最终得到每个类别的修正后的得分最高的 bounding box。回归器得到四个值:x和y方向的偏移量,高度和宽度的缩放值。 回归器的具体训练方法在这里就没讲了,在讲Faster-RCNN的时候会进行讲解。我想应该是有预测框,有ground-truth然后训练得到的。
1.5 小结
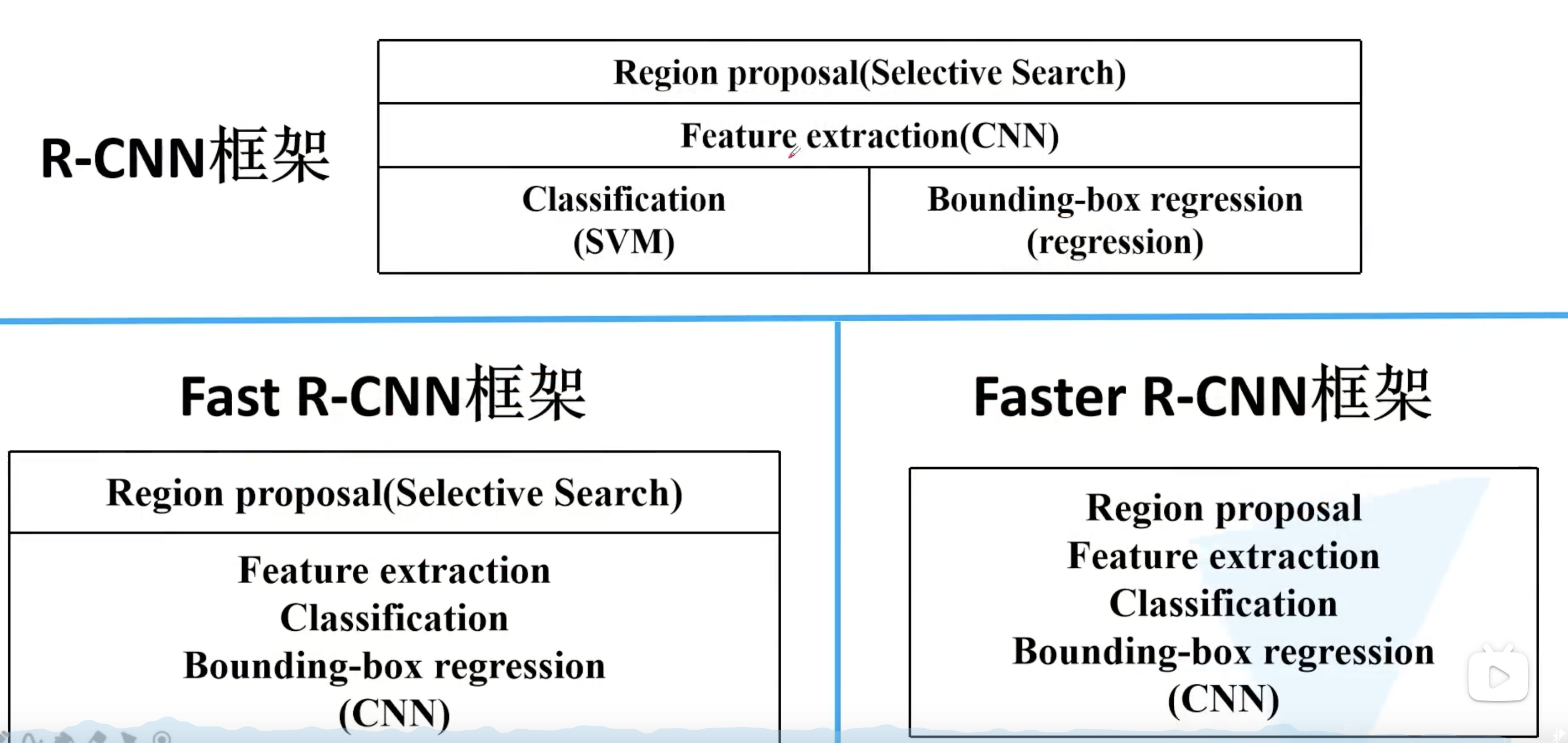
总结起来,R-CNN 包括以下四部分:
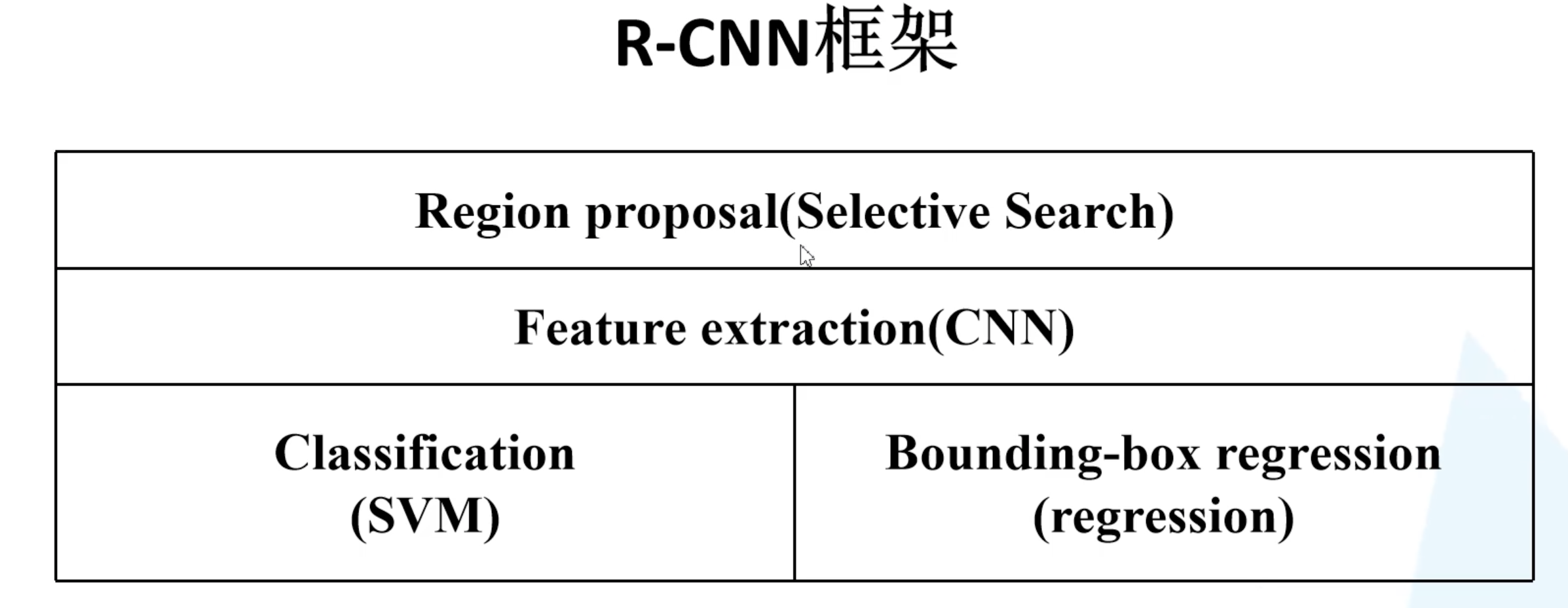
在后面讲 Fast-RCNN 和 Faster-RCNN 的时候这四部分会逐步融合,最终生成一个端对端的完整的网络。
R-CNN 存在的问题:
- 测试速度慢
- 测试一张图约需要 53s (多核CPU),用SS算法提取候选框用时约 2s,一张图像内候选框之间存在大量的重叠,提取特征操作冗余(Fast RCNN将会对其进行优化)。
- 训练速度慢
- 过程及其繁琐
- 训练所需空间大
- 对于 SVM 和 bbox 回归训练,需要从每个图像中的每个目标候选框提取特征,并写入磁盘。对于非常深的网络如 VGG16,从 VOC2007 训练集上的 5k 张图像上提取的特征需要上百GB的存储空间。
2. Fast R-CNN
Fast R-CNN 是作者 Ross Girshick 继 R-CNN 后的又一力作,论文名就叫做 Fast R-CNN,2015年发表的。同样使用 VGG16 作为网络的 backbone,与 R-CNN 相比训练时间快了 9 倍,测试推理时间快了 213 倍,准确率从 62% 提升至了 66% (在 Pascal VOC 数据集上)
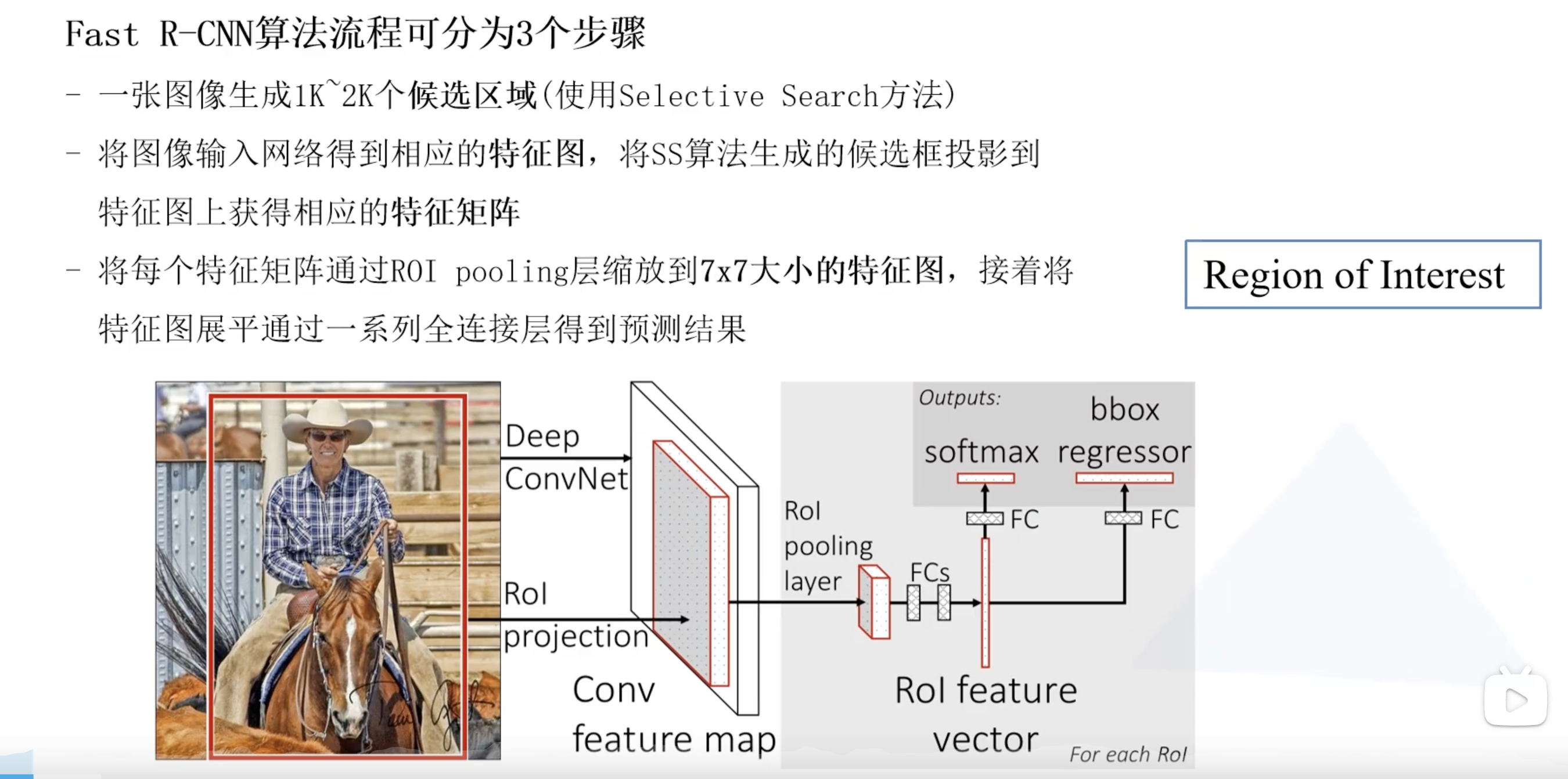
Fast R-CNN 算法流程分三个步骤:
- 一张图像生成1k~2k个候选区域(使用 Selective Search 方法)
- 将图像输入网络得到相应的特征图,将 Selective Search 算法生成的候选框投影到特征图上获得相应的特征矩阵
- 将每个特征矩阵通过 ROI pooling 层(可以看做是SPPNet的简化版本,了解可参考 此处)缩放为 $7 \times 7$ 大小的特征图,接着将特征图展平通过一系列全连接层获得预测结果。
2.1 CNN 模块
第二步就已经和 R-CNN 完全不同了,第三步中 ROI 就是 Region of interest,即感兴趣区域。边界框和目标所属类别同时进行预测。Fast R-CNN 关键在于如何生成候选框的特征?
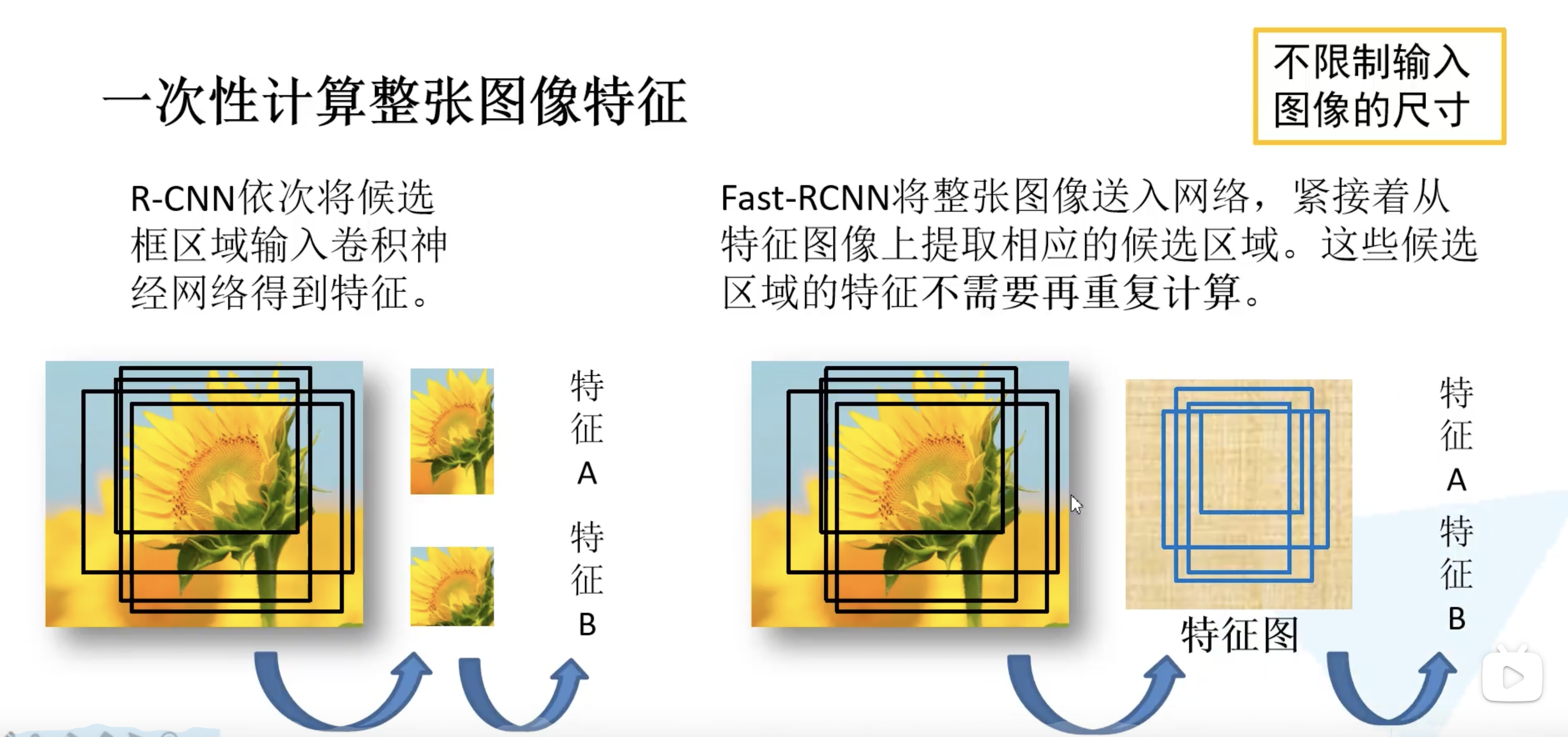
带重复的候选框内的特征不需要重复计算了。训练过程中并不是使用 SS 算法提供的所有的候选区域,训练过程其实只需用使用 2000 个中的一小部分就可以了。
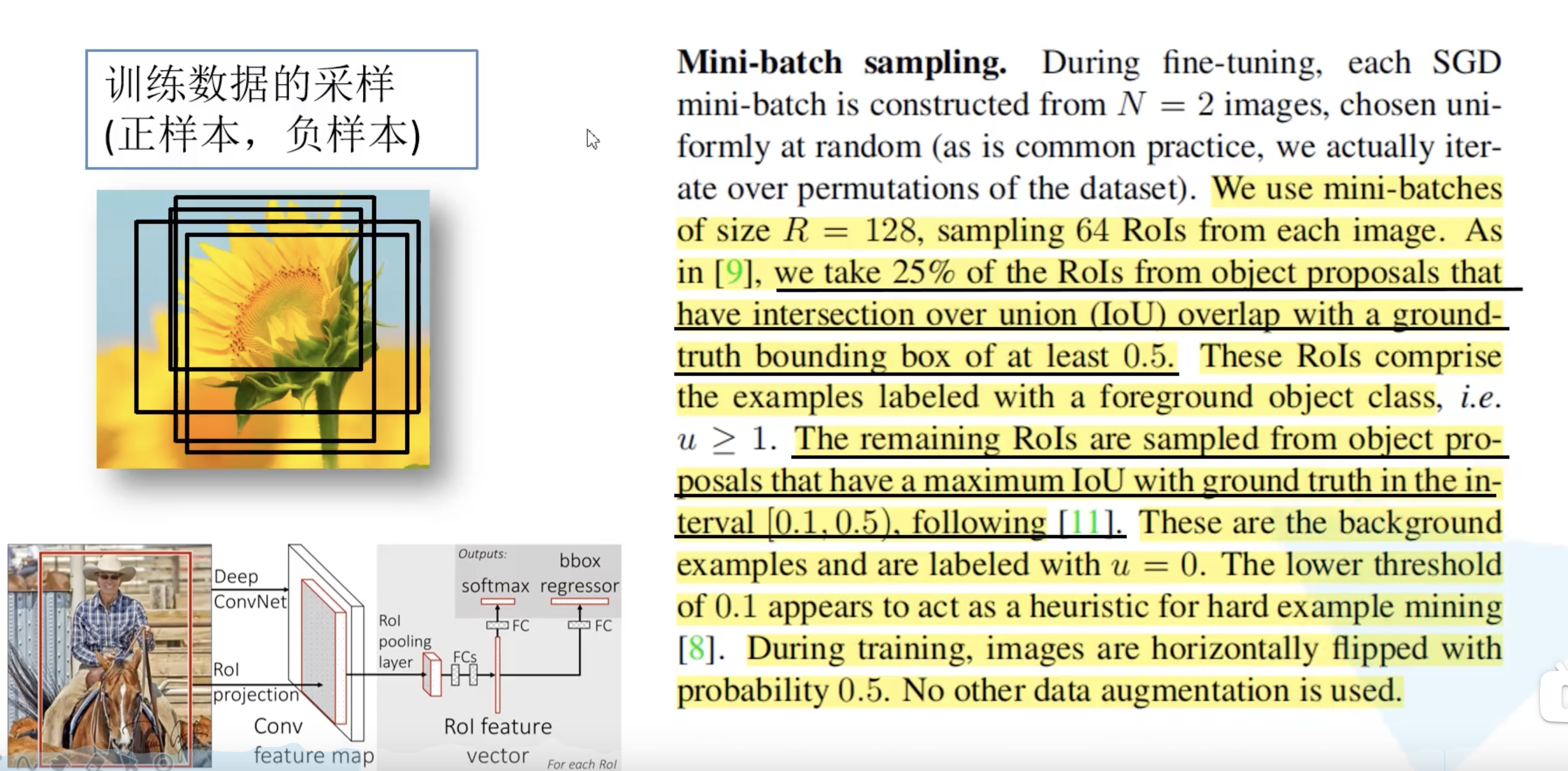
有了训练样本之后,再通过 ROI pooling 层缩放到统一的尺寸。
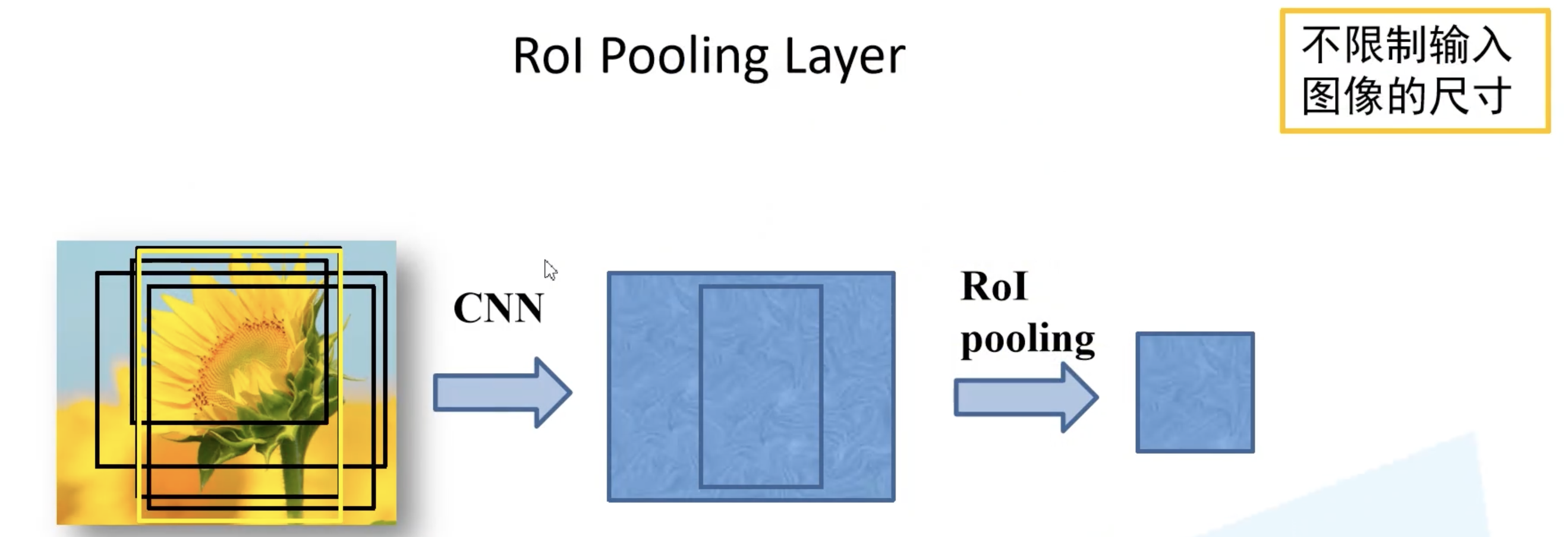
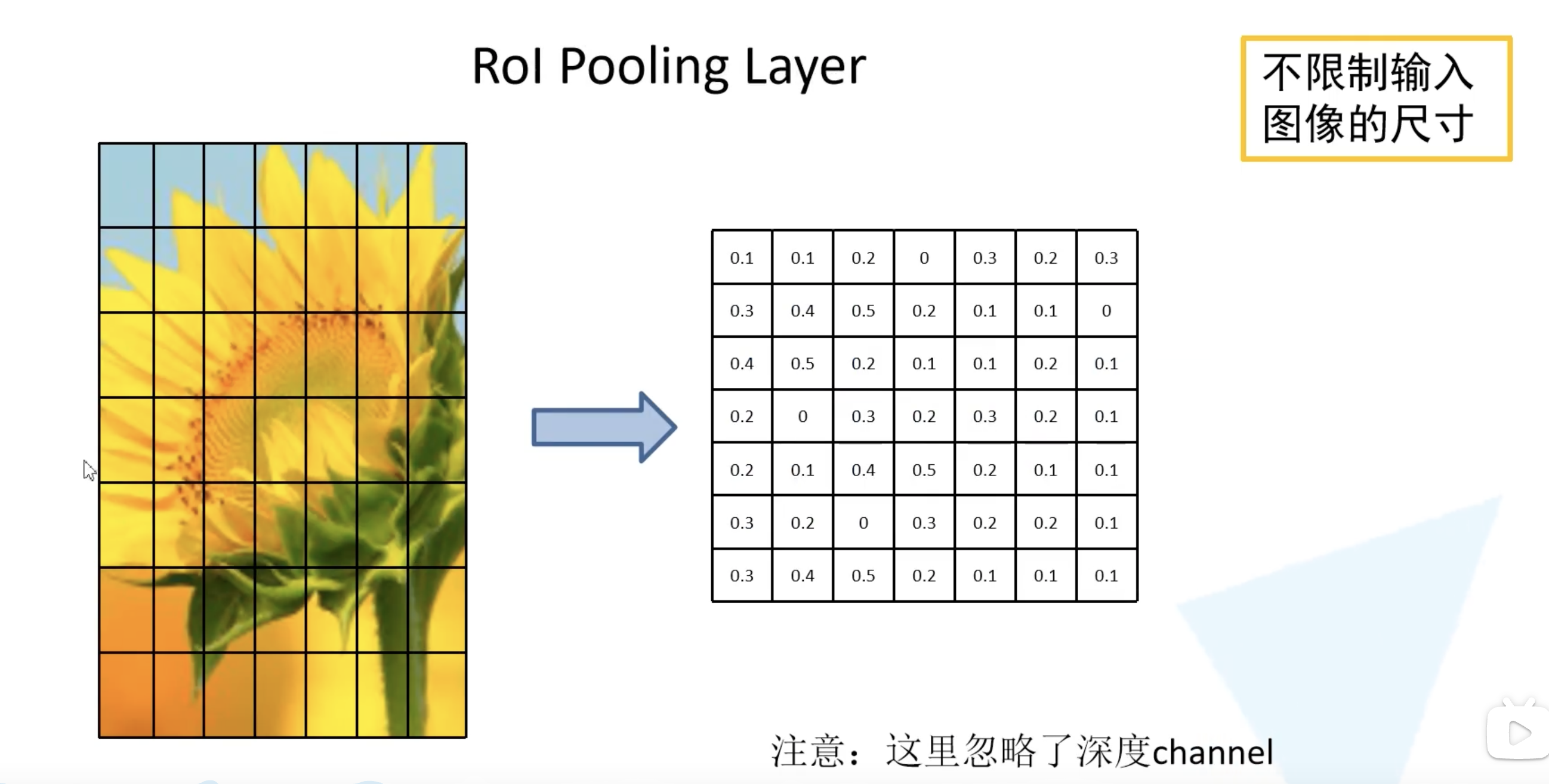
ROI pooling 层如何实现的呢?假设左边的图是一个候选区域在我们特征图上对应的特征矩阵。得到的特征矩阵讲他化为 $7 \times 7$ 的 49 等份,对于每个区域执行最大池化下采样。无论特征矩阵是什么尺寸的,就可以都统一缩放为 $7 \times 7$ 大小,这样就可以不限制输入图像的尺寸了。下面示意图是对于一个channel进行操作,其余channel操作相同。
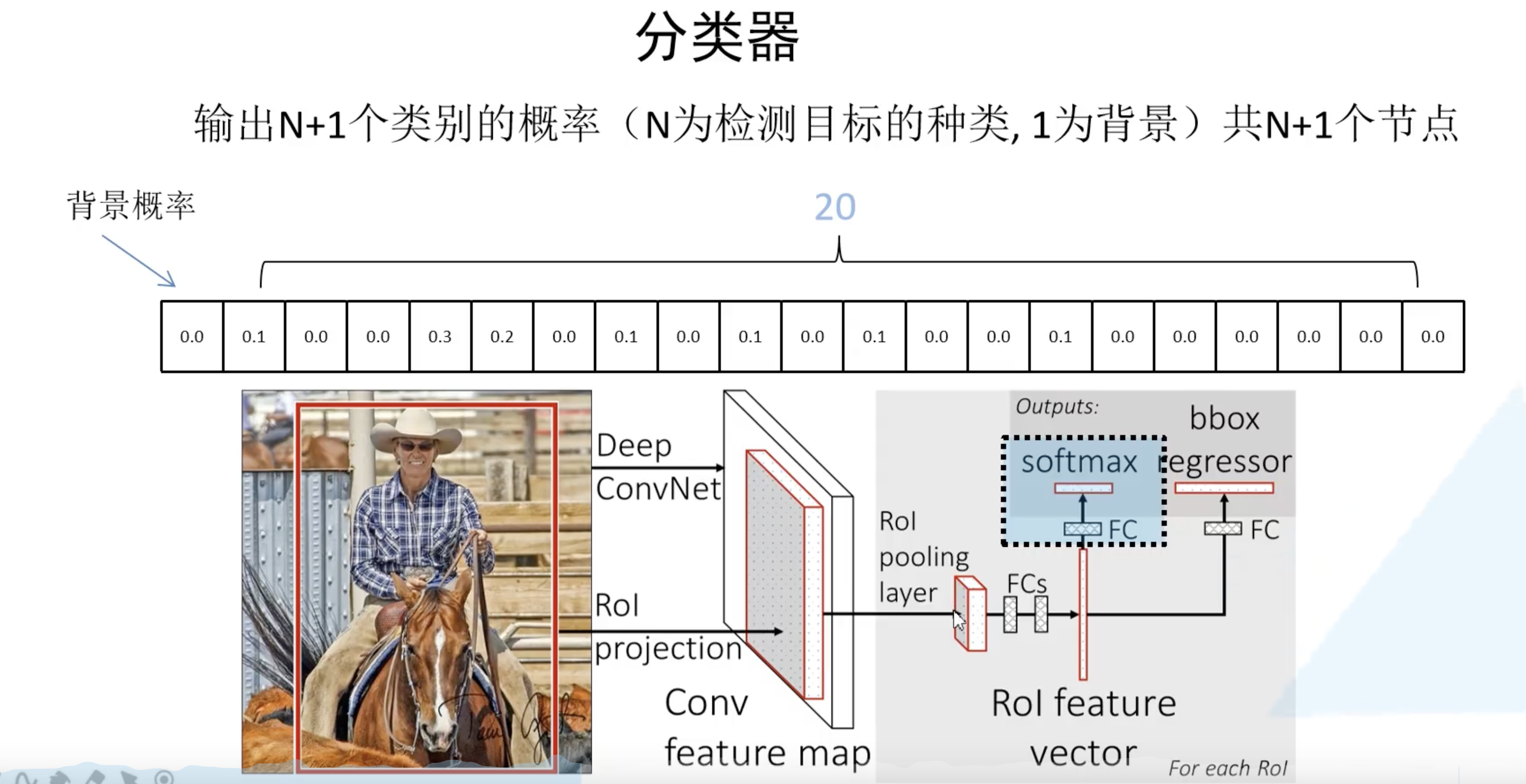
最后的 Fast R-CNN 网络结构如下所示,最后是并联了两个全连接层分别对分类和bbox进行预测。分类结点数为 N+1,因为需要增加上背景。bbox预测的全连接层则是 $4 \times (20 + 1) = 84$ 个结点,对每一类都要预测出来边界框参数。
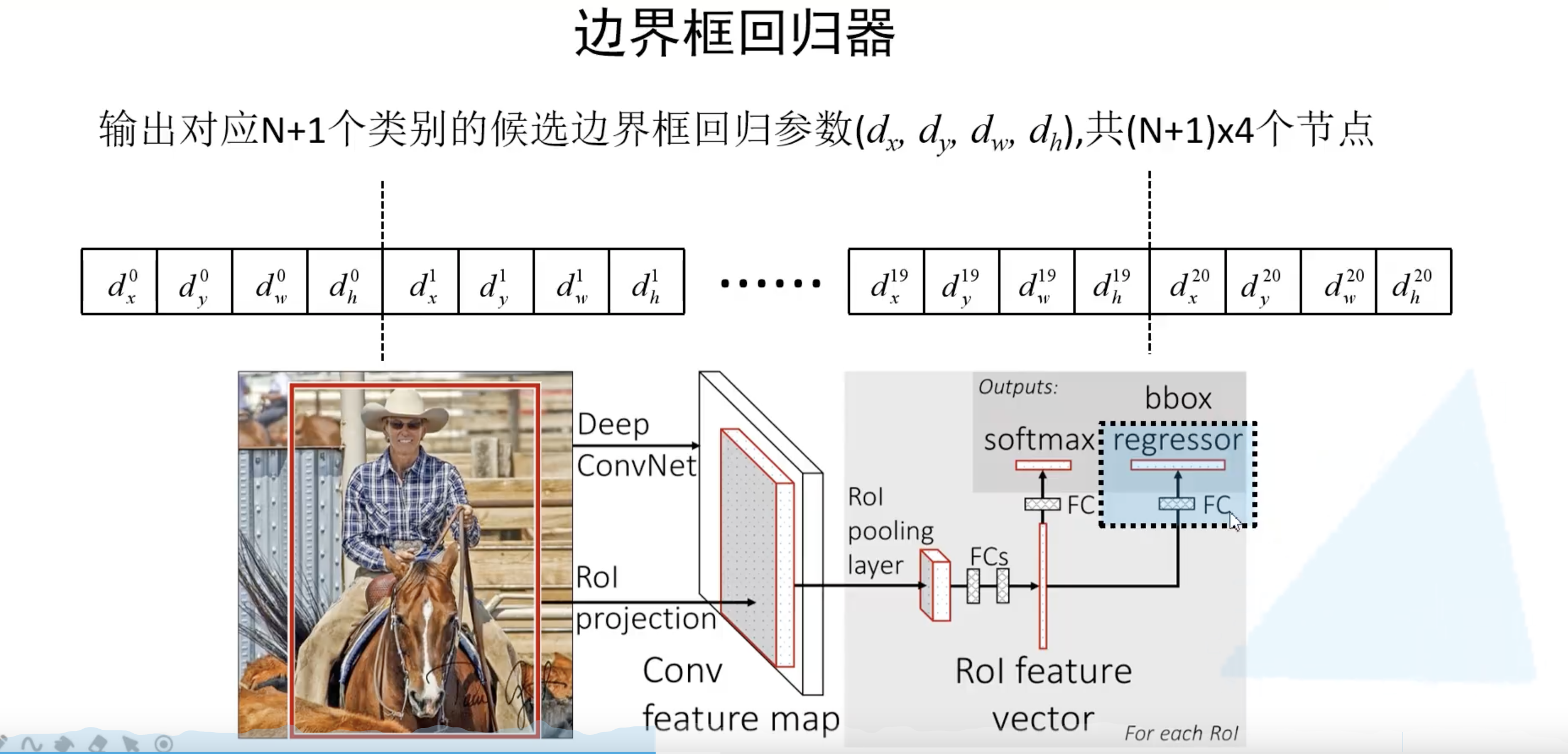
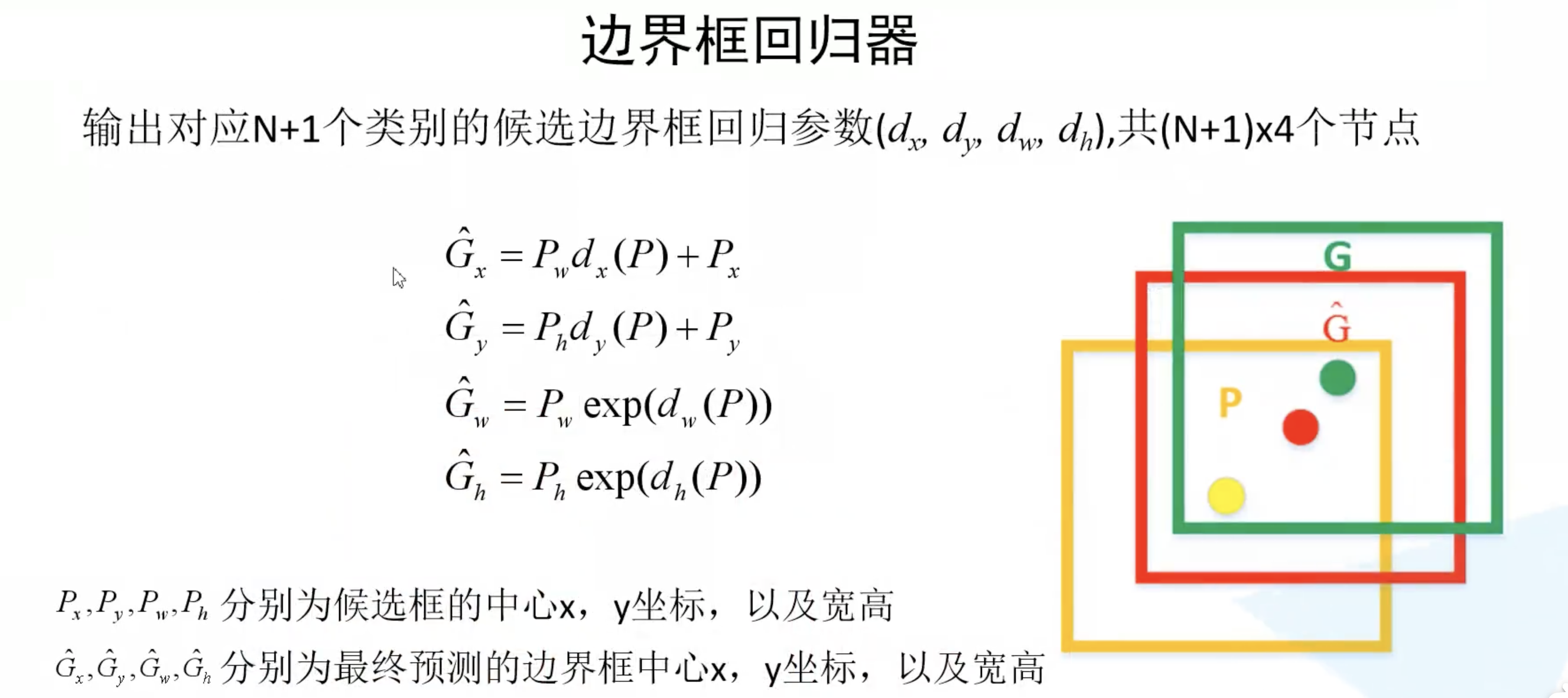
看上去边界框回归器的输出很奇怪,怎么得到预测框呢?从下图可见,$d_x$ 和 $d_y$ 是用来调整候选框中心坐标的参数,$d_w$ 和 $d_h$ 是用来调整候选框大小的参数。通过这个公式我们也可以计算 ground-truth 的 $v_x, v_y, v_w, v_h$ 四个候选框参数。
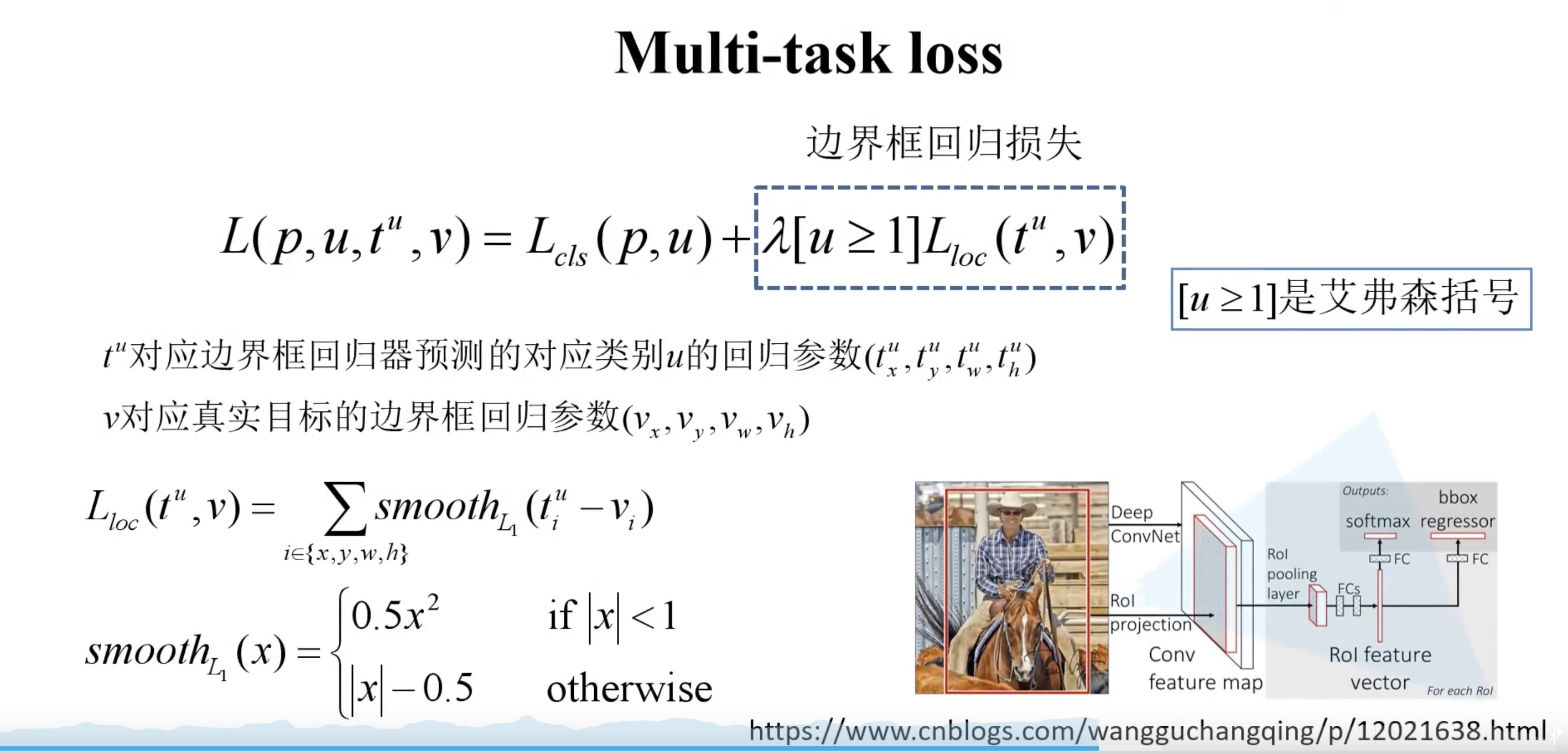
2.2 损失函数
训练损失如下所示:
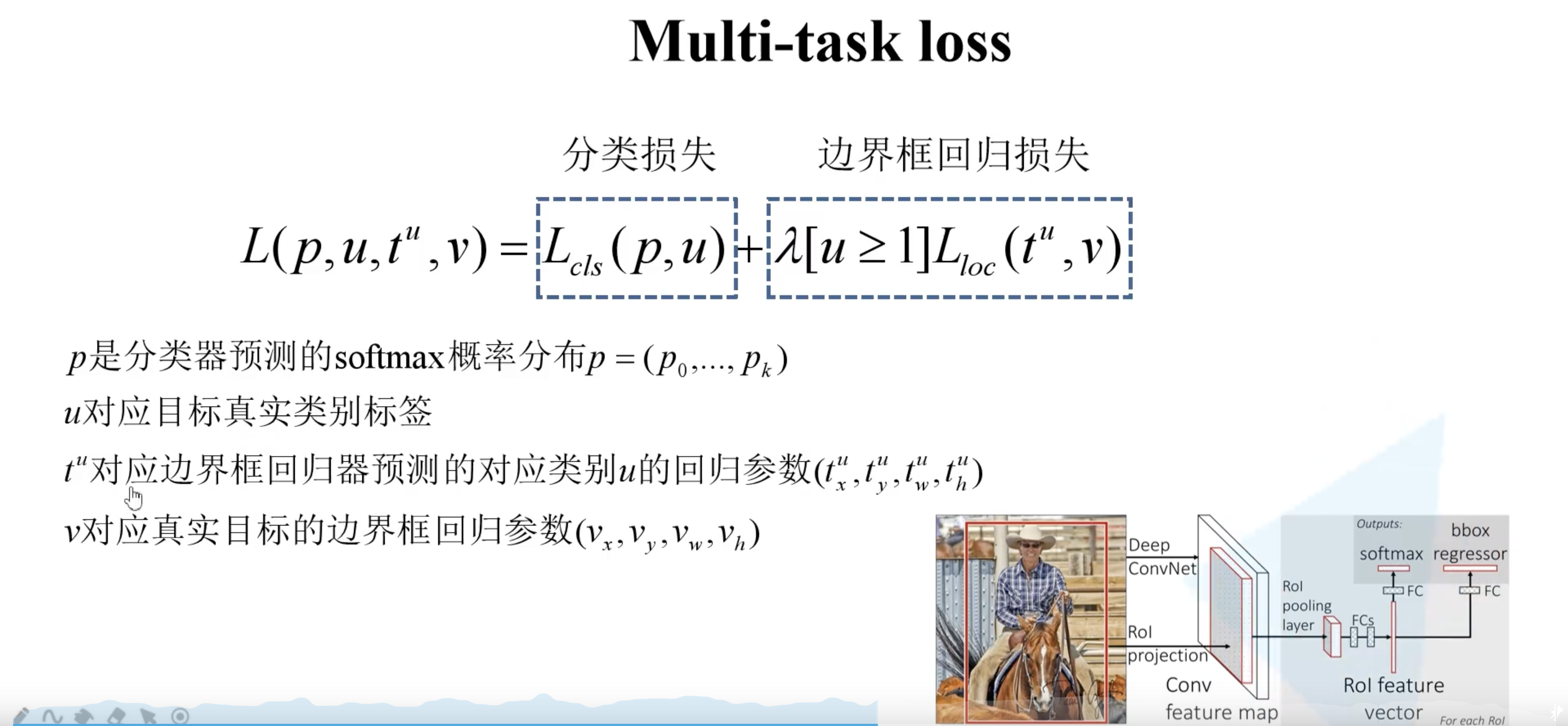
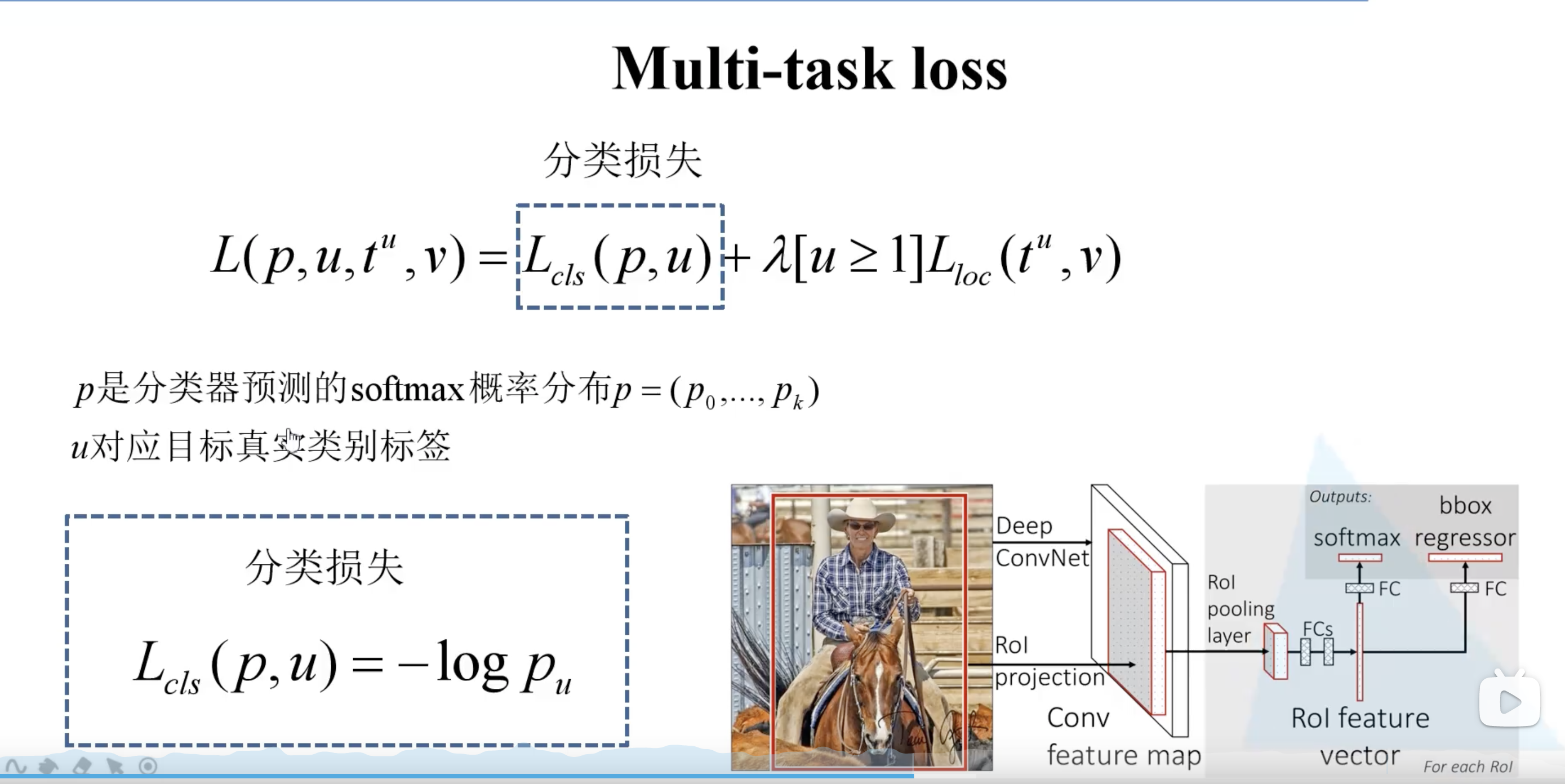
分类损失其实是交叉熵损失,在交叉熵中 $o_i^*$ 只有在真实类别处为1,其余为0(one-hot code),所以 $Loss_{cls} = -log(p_u)$。
边界框回归损失由四部分组成,四个预测参数的 $Smooth_{L1}$ 损失构成的,$\lambda$ 是一个平衡系数,第二项中括号表示当 $u \geq 1$ 时为1,否则为 0。$u$ 是目标的真实标签。这个部分说明候选区域确实是我们需要检测的部分,对应着正样本。当 $u = 0$ 对应着负样本,就没有边界框损失了。
2.3 小结
Fast R-CNN 只有两个部分了,速度瓶颈依然在 SS 算法。Faster R-CNN 将 SS 算法也交由神经网络实现,就构建出端到端的网络了。
疑问:边界框预测就意味着一张图中不能出现两个人?因为一个类别预测了一个框。
个人思考:应该是每一个投影后的区域会经过后面的全连接层,所以一个边界框中就只有一个物体,所以边界框预测仅需要对每一类预测四个参数就可以了!
3. Faster R-CNN
Faster R-CNN 是作者 Ross Girshick 继 Fast R-CNN 后的又一力作,同样使用 VGG16 作为 backbone,推理速度在 GPU 上达到 5fps(每秒检测五张图,包括候选区域生成),准确度也有一定的进步。核心在于 RPN 区域生成网络(Region Proposal Network)。
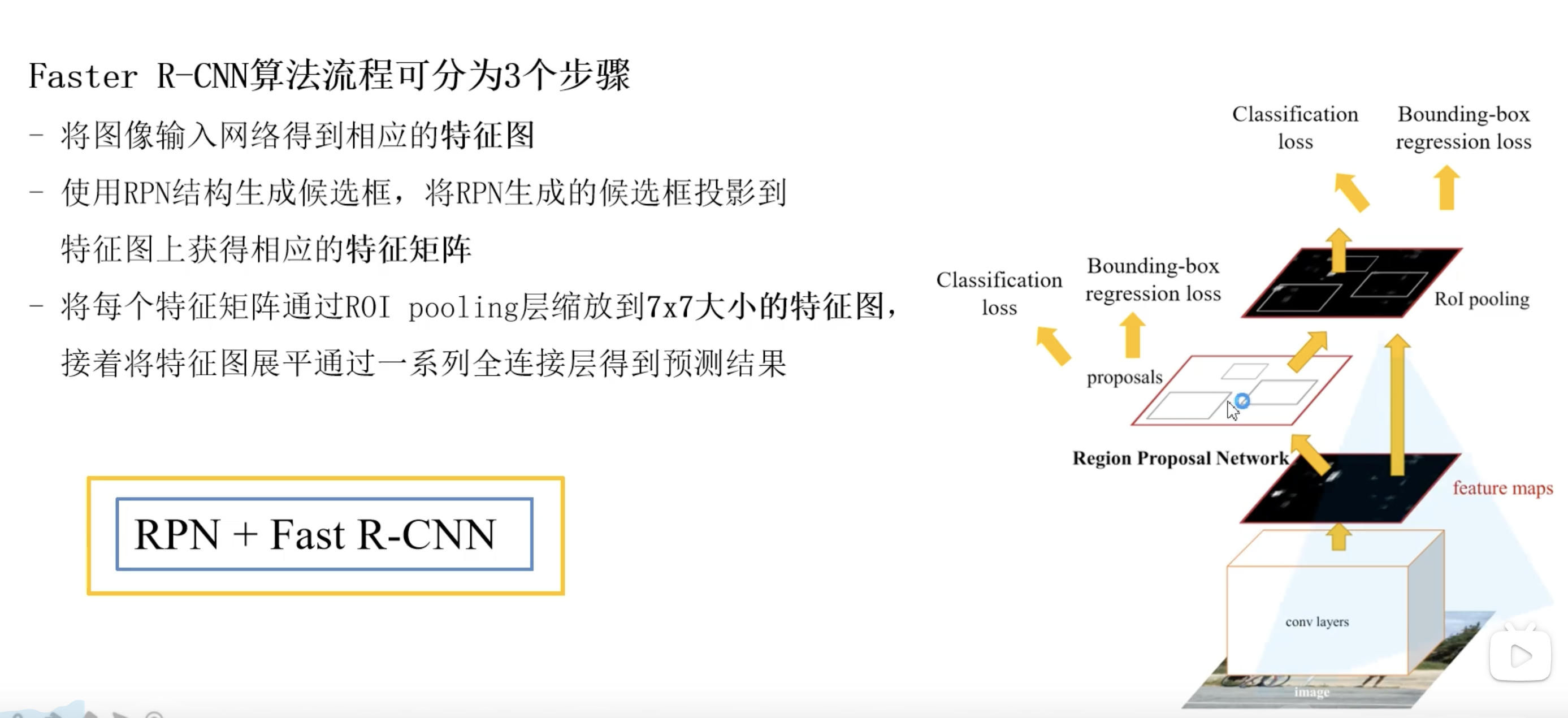
Faster R-CNN 算法流程分三个步骤:
- 将图像输入网络得到相应的特征图
- 使用RPN结构生成候选框,将 RPN 生成的候选框投影到特征图上获得相应的特征矩阵。
- 将每个特征矩阵通过 ROI pooling 层(可以看做是SPPNet的简化版本,了解可参考 此处)缩放为 $7 \times 7$ 大小的特征图,接着将特征图展平通过一系列全连接层获得预测结果。
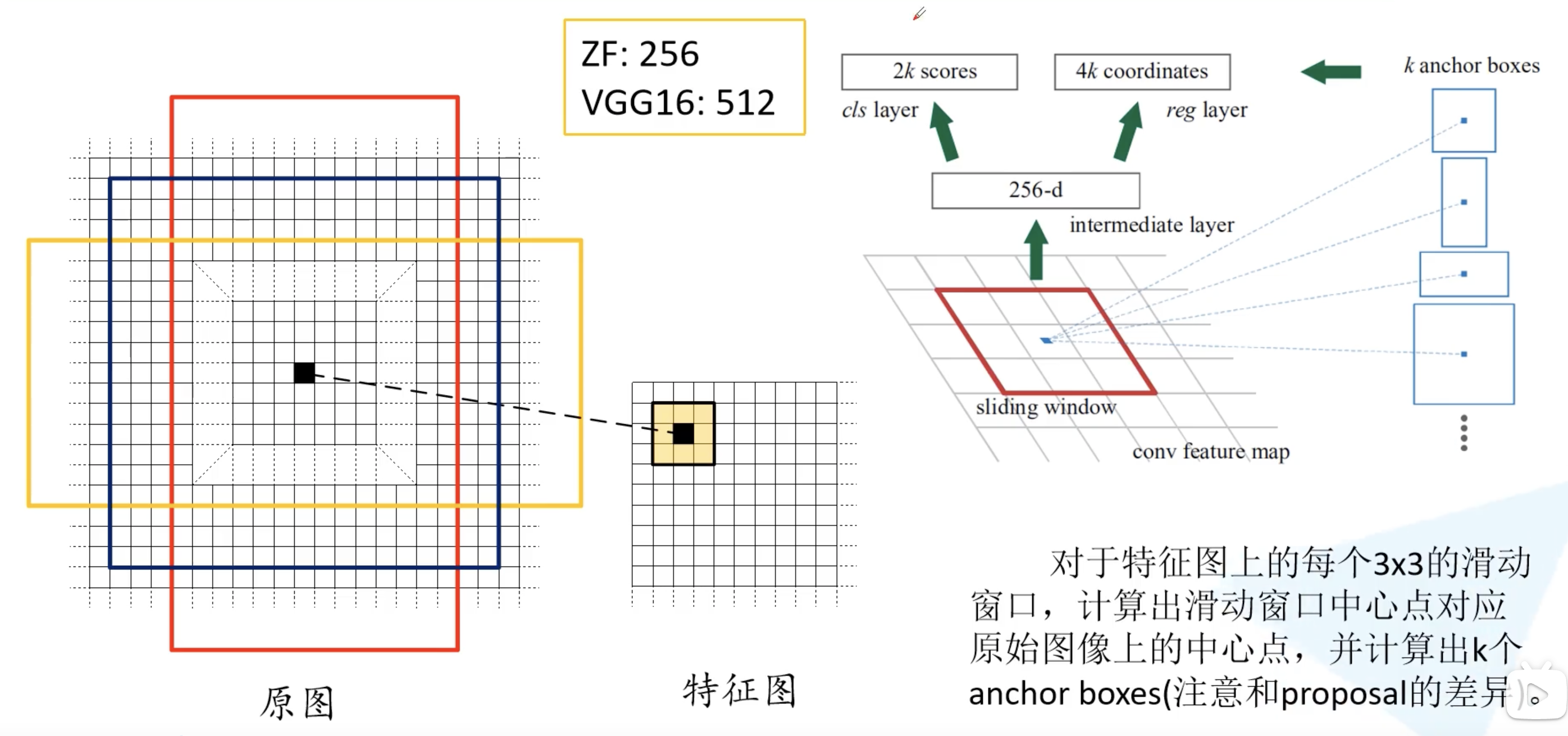
3.1 RPN 网络结构
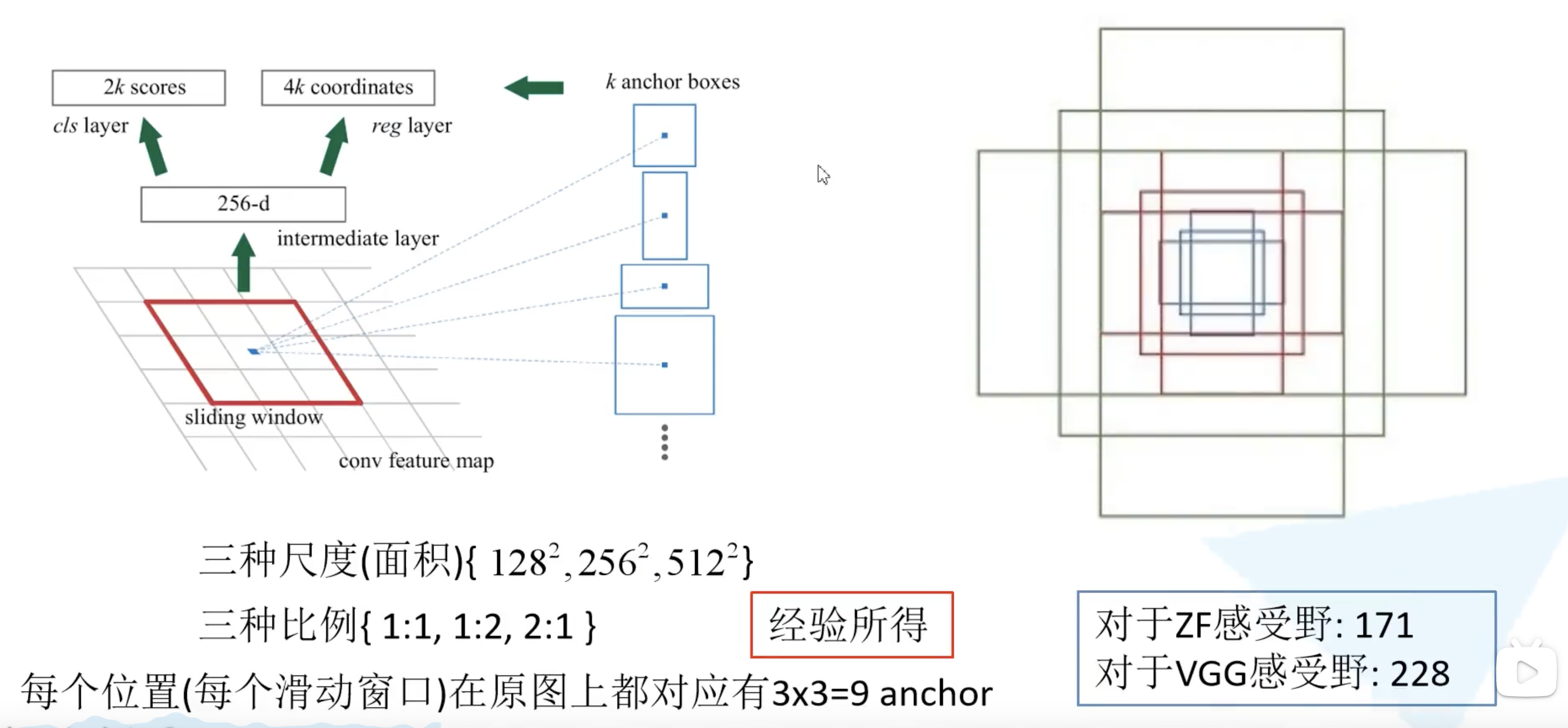
在特征图上使用滑动窗口,每滑动到一个位置生成一个一维的向量, 在向量的基础上通过两个全连接层去输出目标概率和边界框回归参数。2k 中的 k 指的是 k 个 anchor boxes,2是指为背景的概率和为前景的概率。每个 anchor 有 4 个边界框回归参数。这里一维向量的维度是根据使用backbone的通道数来定的,比如VGG16为512个通道,而使用ZF网络则是256个通道。对于每个 $3 \times 3$ 的滑动窗口计算中心点在原图中的位置。然后特征图点的k 个 anchor boxes 对应着原图对应点为中心计算 k 个 anchor boxes。每个都给定了大小和形状,例如下图中给出来了三个示例。
注意这里只预测每个 anchor boxes 是前景还是背景,没有具体的类别。因为是滑动窗口,所以 anchor boxes 中可能有目标物体也可能没有。然后给出了中心位置的偏移量和大小调整,训练希望能够尽可能准确的框选出目标。所检测物体的大小和长宽比都可能是不同的,所以给出了一系列的 anchor 来预测目标的位置。
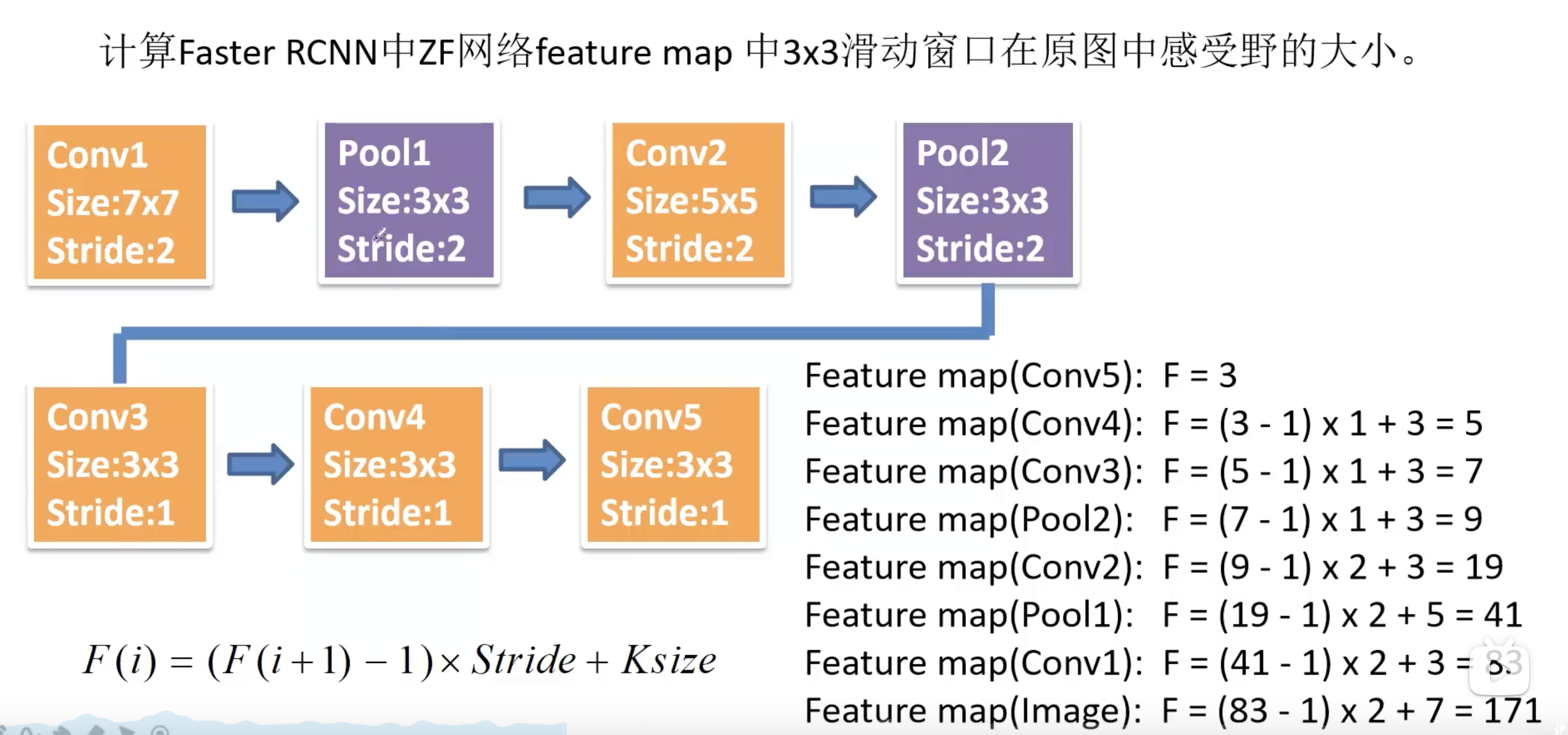
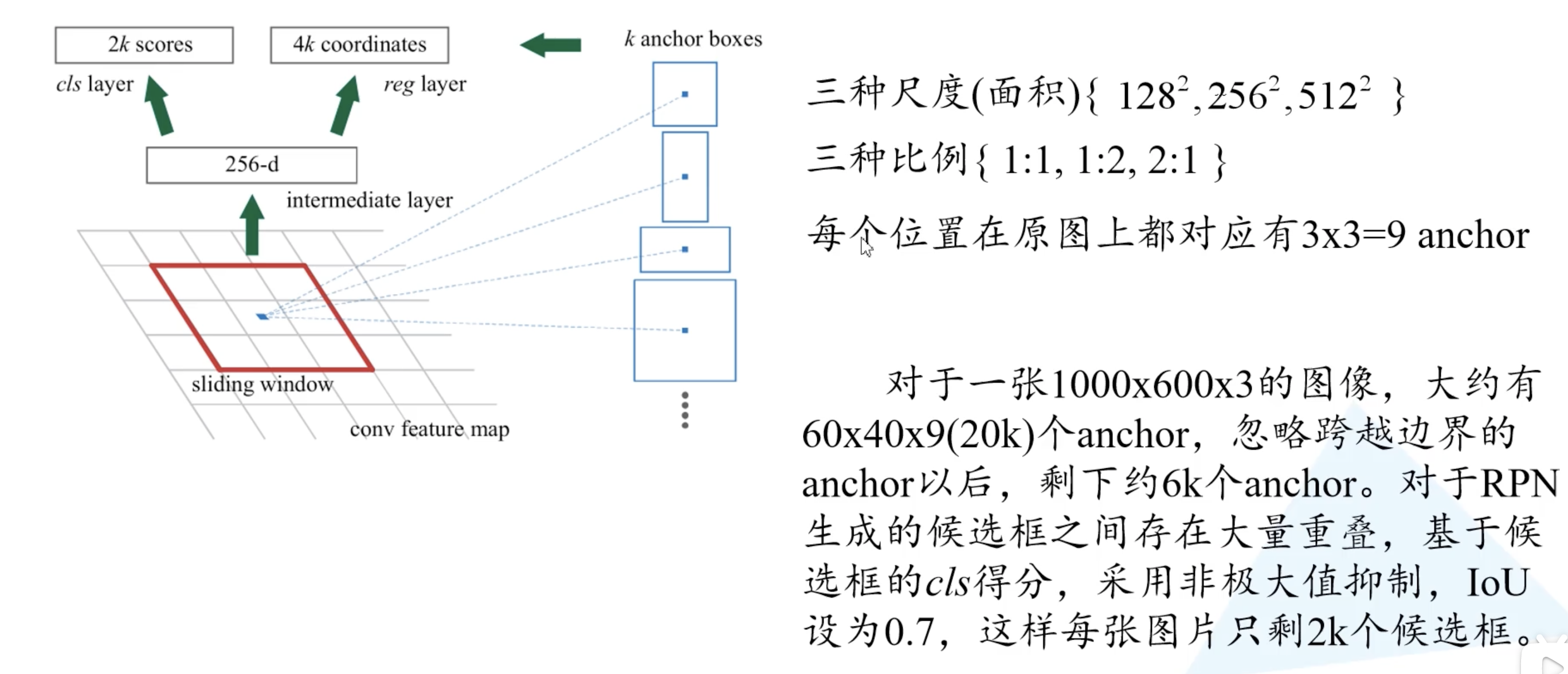
接下来讲讲 Faster R-CNN 中给出了哪些尺度和比例的 anchor boxes。不同尺度不同比例对应着蓝色,红色,绿色的九个 anchor。也就是实际上每个地方都会生成 $2 \times 9 = 18$ 个类别分数和 $4 \times 9 = 36$ 个边界框回归参数。$3 \times 3$ 的滑动窗口在 ZF 网络中感受野为 171,而在 VGG16 中为 228。为什么还能预测 256 甚至 512 感受野呢?作者在论文中提出的观点是通过小感受野预测比他大的感受野是有可能的。例如通过经验我们看到物体的一部分就大概猜出了全貌。实际使用中这个也是有效的。
下图给出了ZF网络如何计算感受野的:
对于一个 $1000 \times 600 \times 3$ 的图像,特征图大约就是 $60 \times 40$ 大小。获得大量的候选框有很多的重叠,基于候选框的cls得分,采用非极大值抑制,设定 iou 为 0.7(也就是说找到最大cls的,删除和它iou大于等于0.7的候选框,然后找下一个…),就获得近似原始 SS 算法个数的 2k 个候选框。注意:anchor 和候选框不一样,anchor 加上四个边界框回归参数才能成为候选框。
多说一下滑动窗口怎么实现的?其实就是使用步长为1,padding也为 1 的 $3 \times 3$ 卷积。卷积后得到的和特征图尺寸深度都是一样的。得到的特征矩阵上并联两个 $1 \times 1$ 的卷积层,就能得到类别回归的预测和边界框回归的预测。
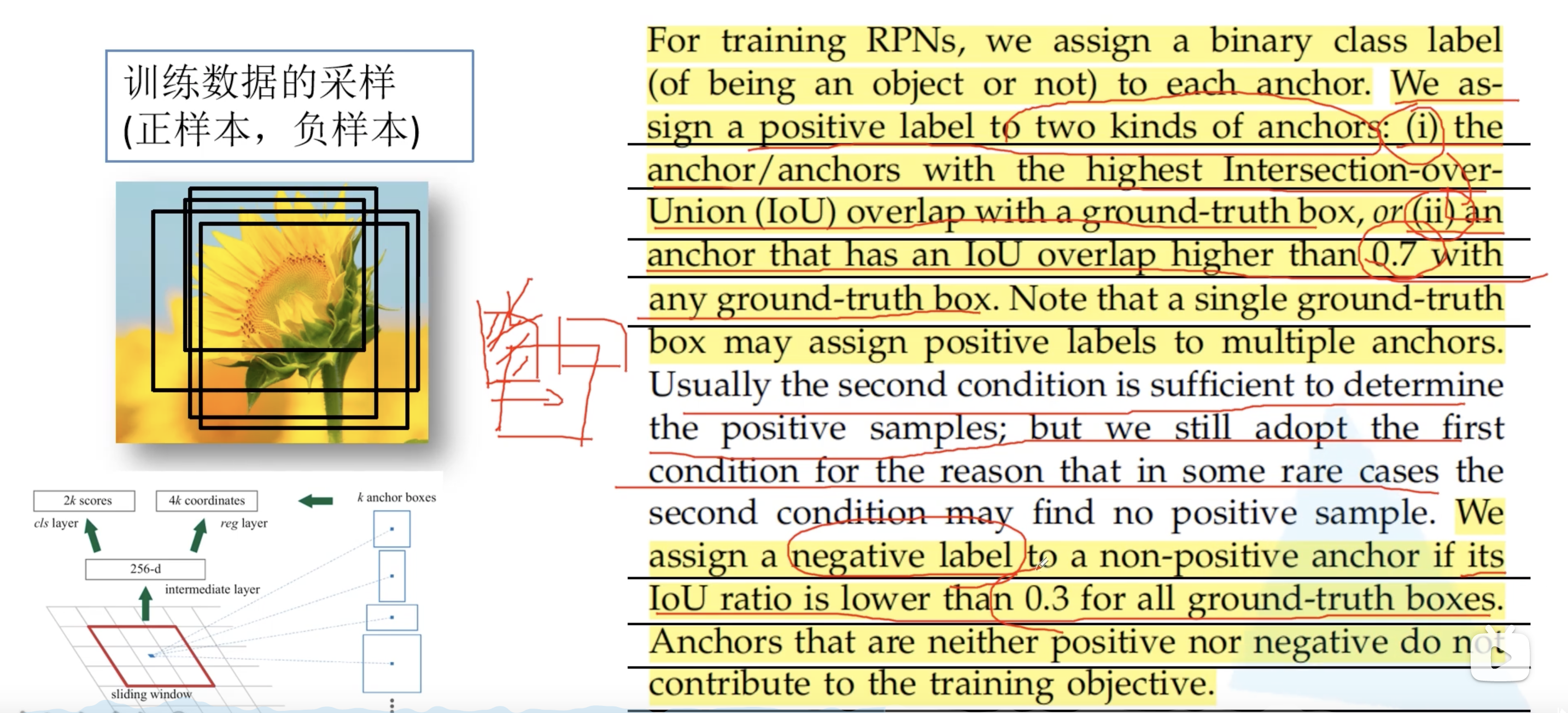
实际上生成的这么多 anchor 并不是每个都用来训练 RPN 网络。对于每张图片我们从上万个 anchor 当中采样 256 个 anchor,这些 anchor 由正样本和负样本 1:1 组成的。如果正样本不足 128,就用负样本进行填充。两种定义正样本的方式:(1)anchor 与 ground-truth 的 iou 超过 0.7,(2)某个 anchor 与 ground-truth 拥有最大的 iou。负样本是与所有的 ground-truth 的 iou 都小于 0.3 的。
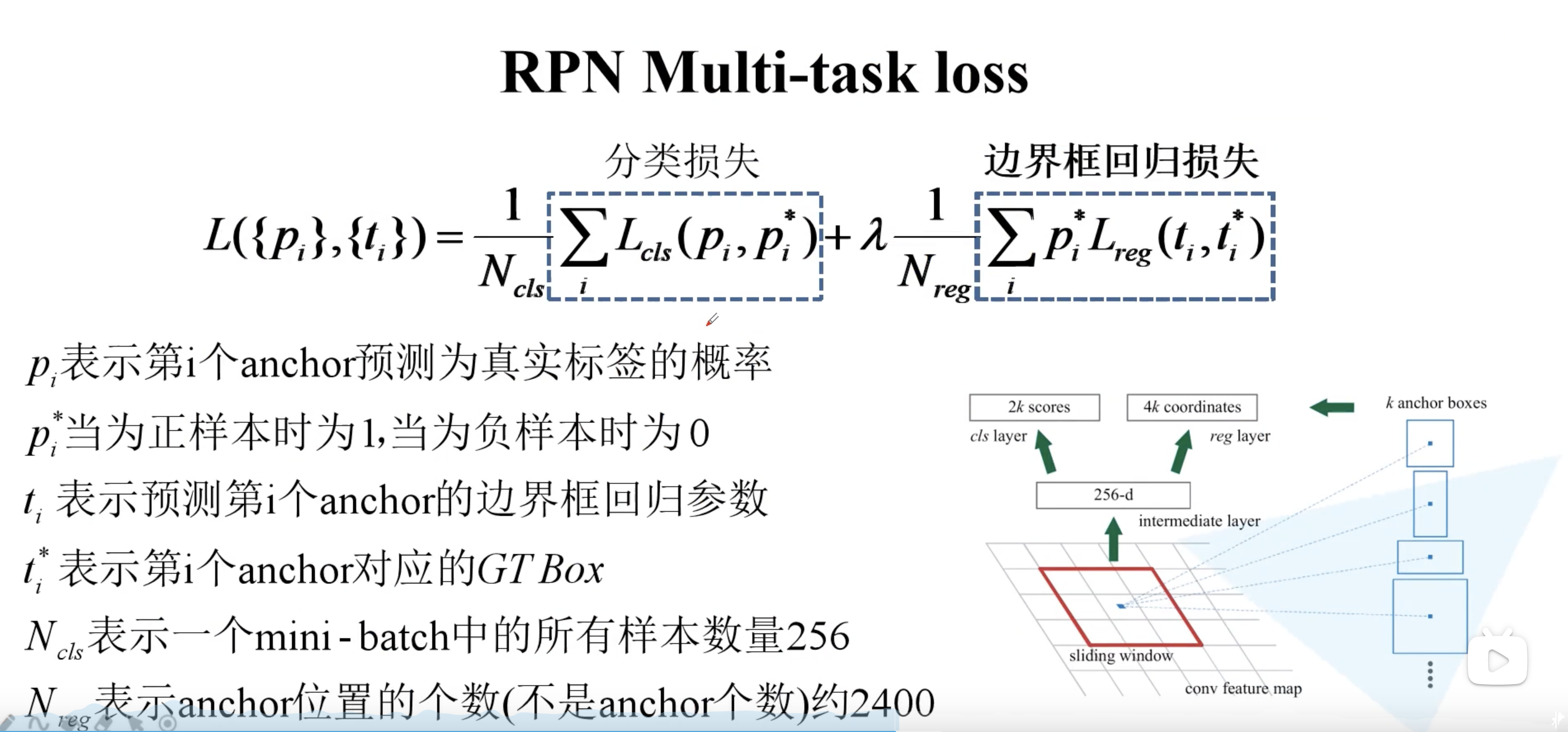
3.2 RPN 损失
RPN的损失也分为两个部分,分类损失和边界框回归损失。其中注意,anchor 位置的个数其实就是特征图大小,也就是 $60 \times 40$ 近似于 2400。$\lambda$ 是一个平衡系数,论文中取 10。
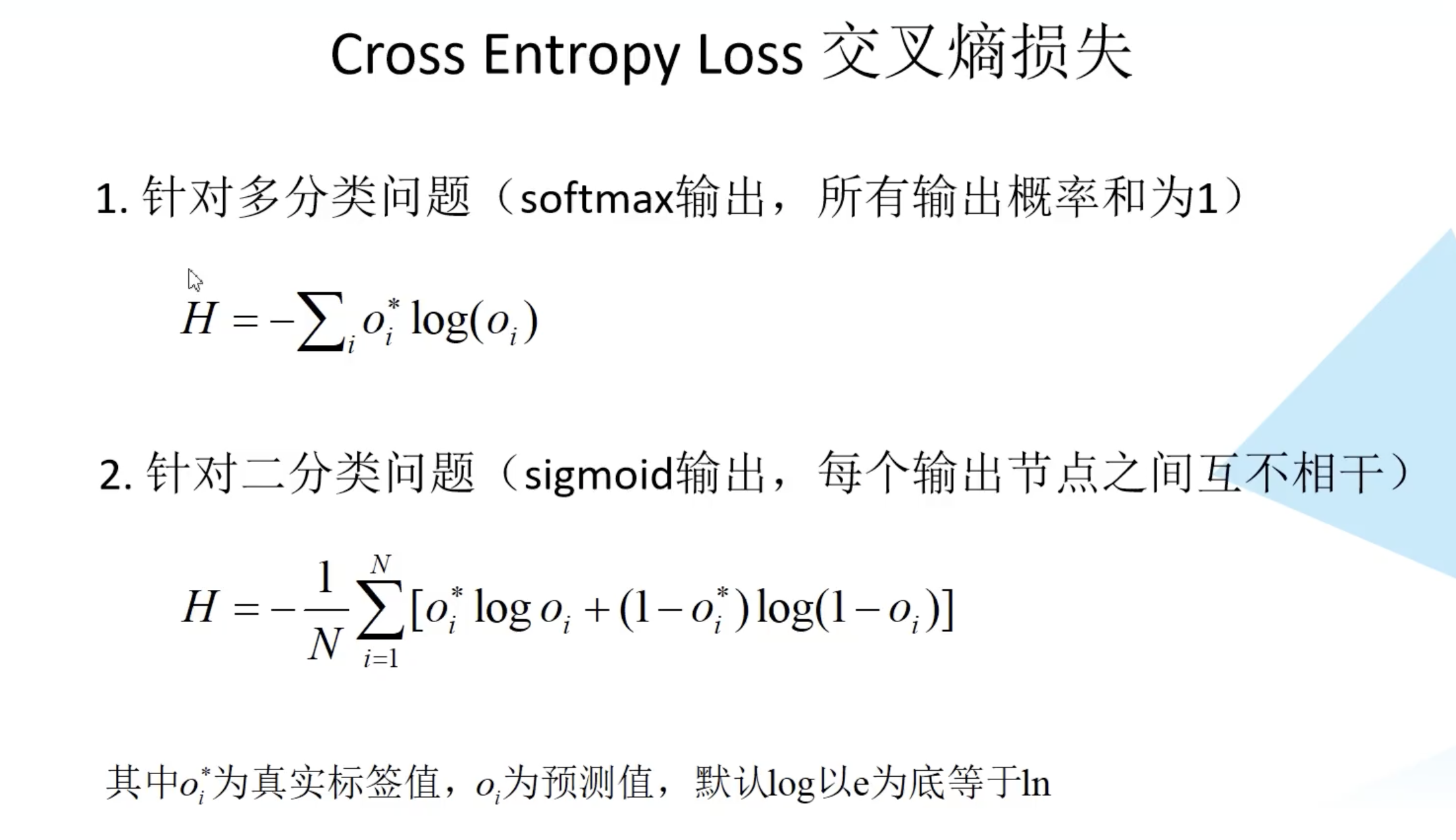
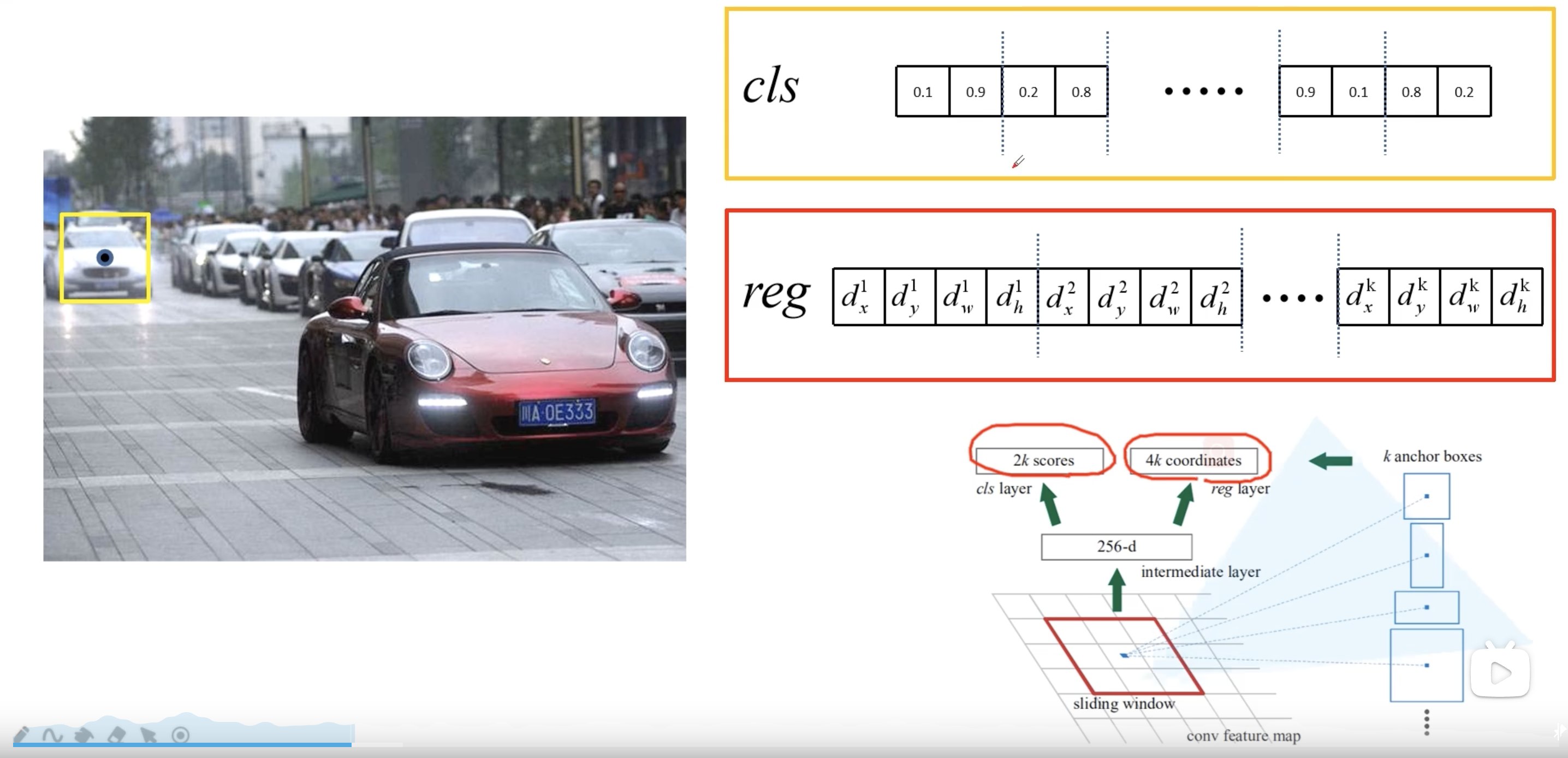
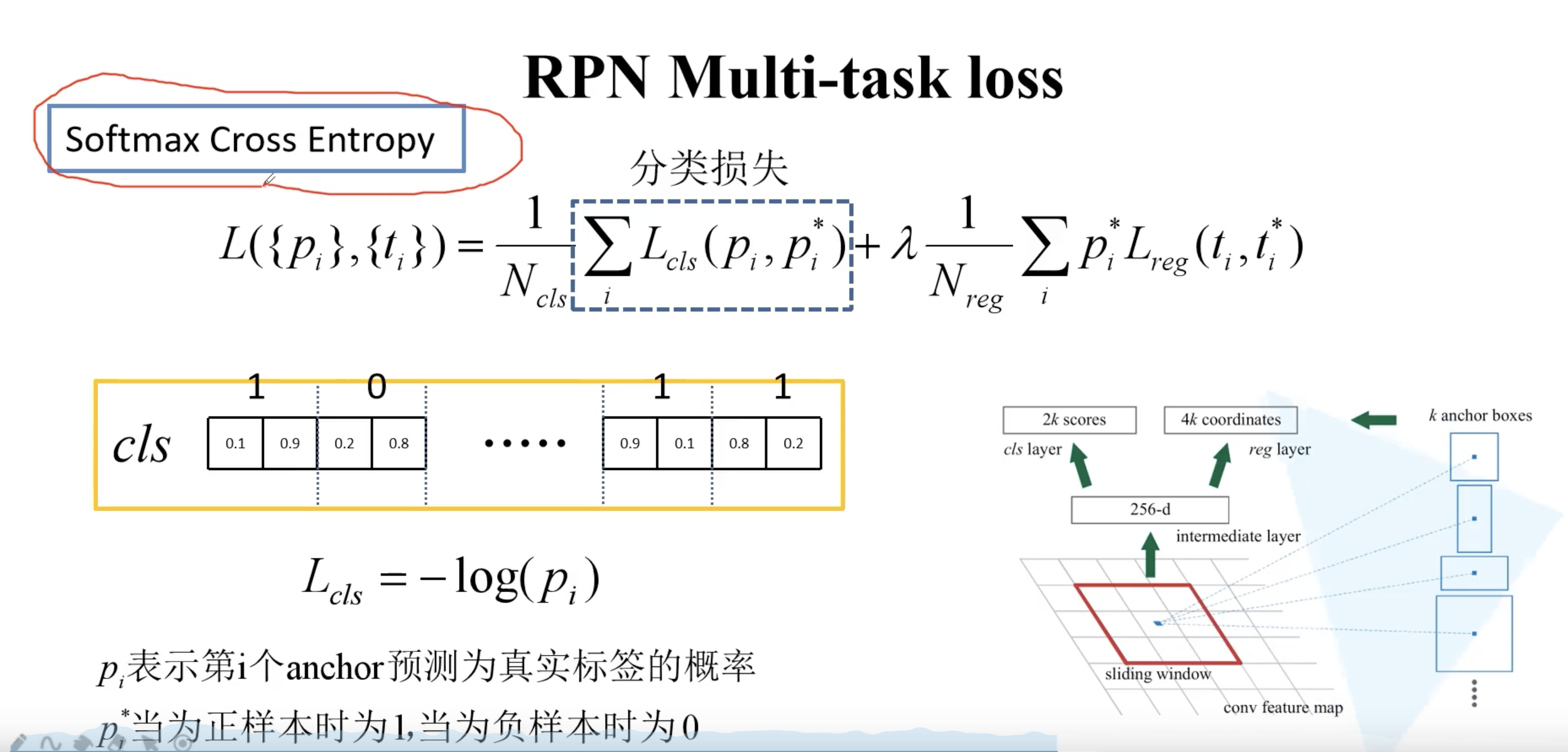
注意分类损失这里其实用的是类似多分类的 softmax cross-entropy,而不是二分类的 sigmoid cross-entropy。在下图中,第一项损失为 $-\log 0.9$,第二项因为真实标签为 0,所以为 $-\log 0.2$,依此类推。
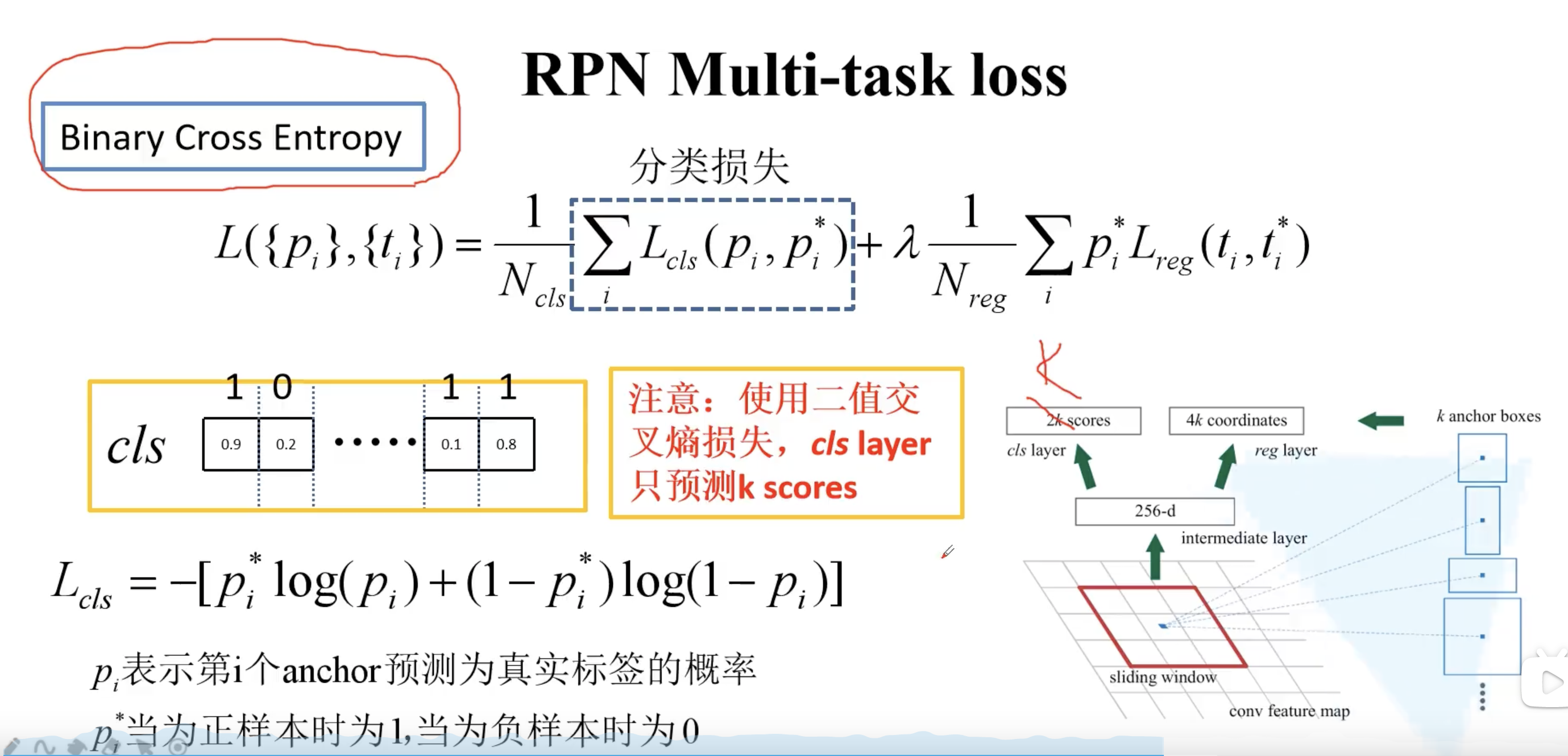
如果使用二分类的交叉熵损失,就是 k 个预测得分,而不是 2k 了。经过 sigmoid 输出后,如果是接近 1 则是前景,如果是接近 0 则是背景。此时 loss 依然是 $-(\log 0.9+\log 0.8 + …)$。pytorch 官方实现的 Faster R-CNN 就是使用的二分类的交叉熵损失
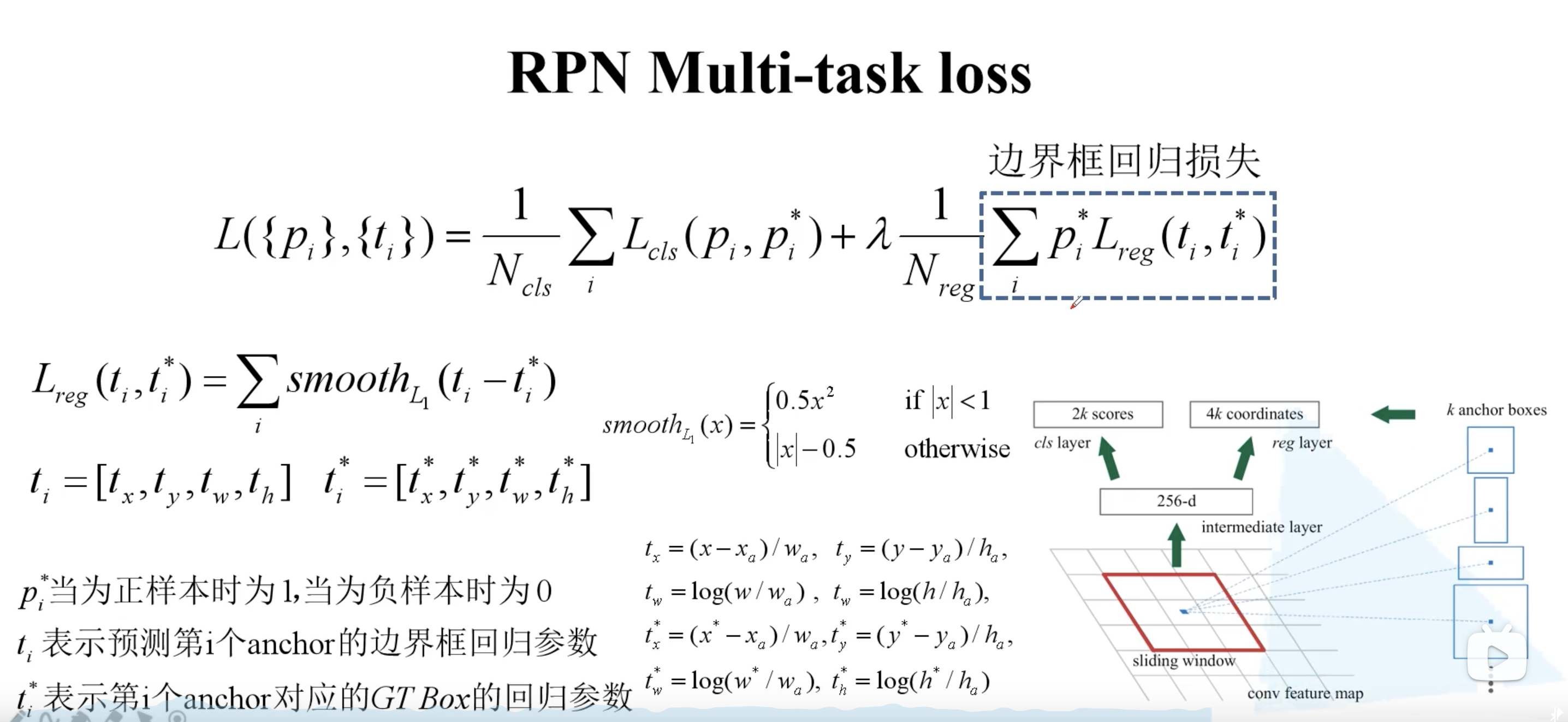
边界框回归损失和 Fast R-CNN 是一样的。$p_i^$ 保证只对真实的边界框才计算损失。$t$ 是直接预测出来的,$t^$ 则要根据 ground-truth 计算出来。
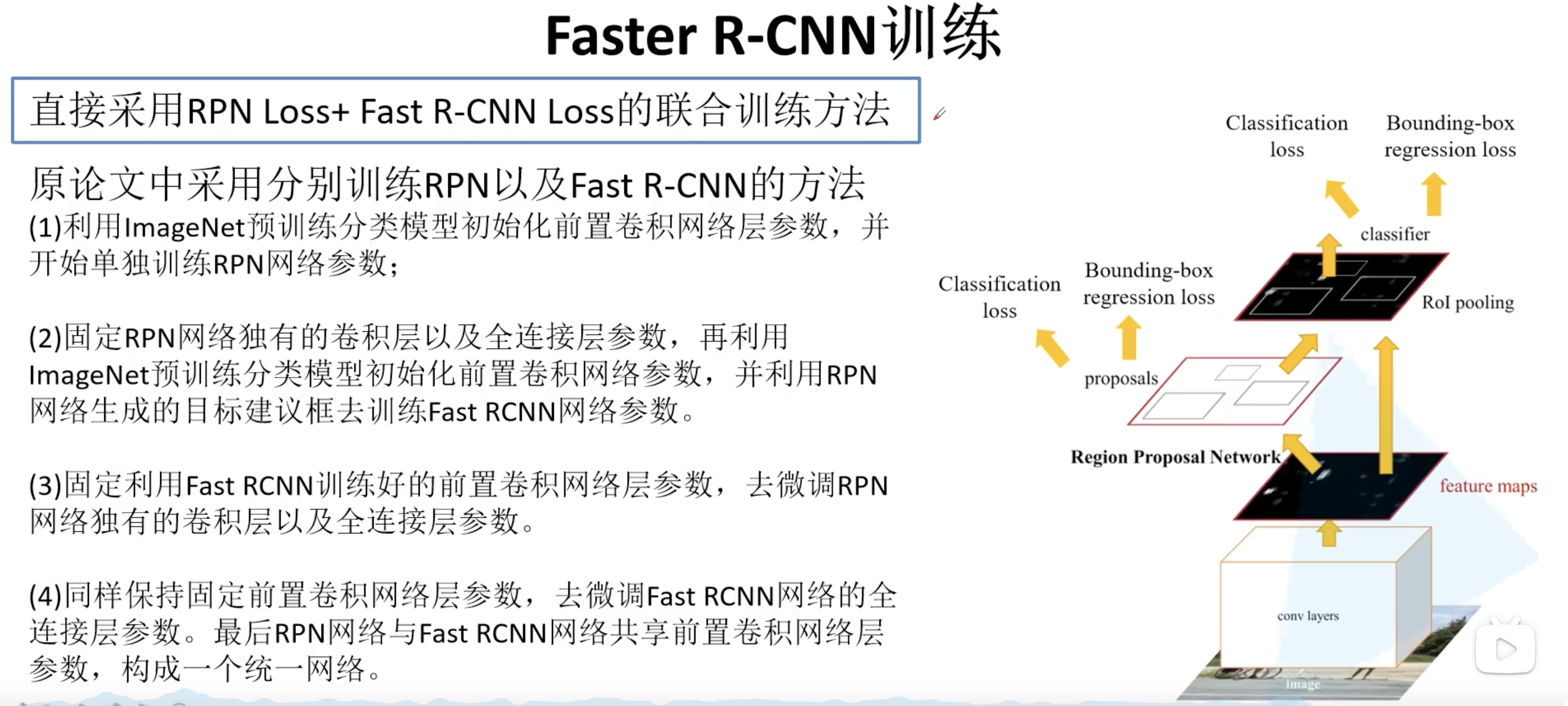
3.3 Faster R-CNN 训练
现在是联合训练(pytorch官方实现的方法也是联合训练),原来论文是分别训练。
3.4 小结
Faster R-CNN 仅包含一个部分了。
最后比较一下 R-CNN 到 Fast R-CNN 再到 Faster R-CNN 的进步。